Summary
This is the first article in a series about my journey implementing PSoC 6 SDK libraries for the Maxxim One Wire Bus and the DS18B20 temperature sensor.
As you can see there will be many parts to this story:
| Article |
|---|
| PSoC 6 SDK OneWire Bus (Part 1) : Build Basic Project |
| PSoC 6 SDK OneWire Bus (Part 2) : Implement Read & Write |
| PSoC 6 SDK OneWire Bus (Part 3) : Remove Busy Wait & Debug |
| PSoC 6 SDK OneWire Bus (Part 4): But, Can it Read the Temperature? |
| PSoC 6 SDK OneWire Bus (Part 5): Round out the OWB Driver |
Story
I recently got a twitter message from a gentleman named “Neeraj Dhekale”. He asked about a library for a one wire sensor for PSoC, actually to be specific he asked about a component for a PSoC 4.
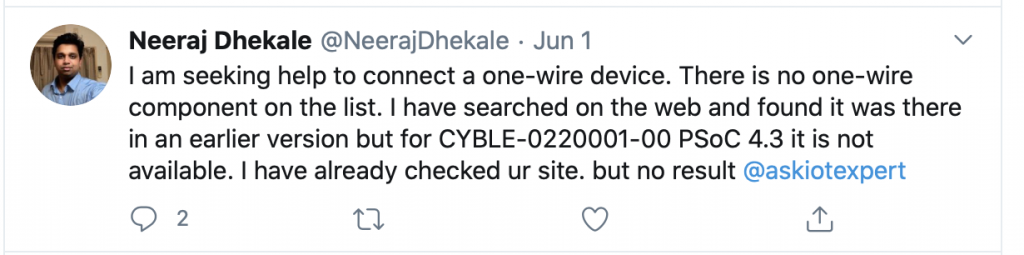
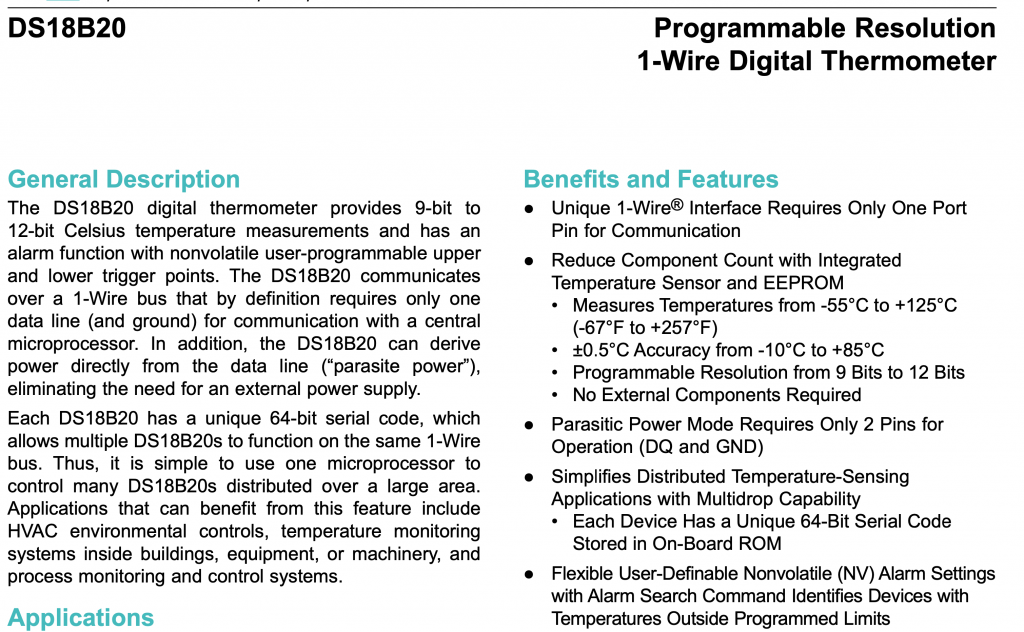
Then I asked him what sensor and responded that he wanted to use the Maxxim DS18B20 temperature sensor.

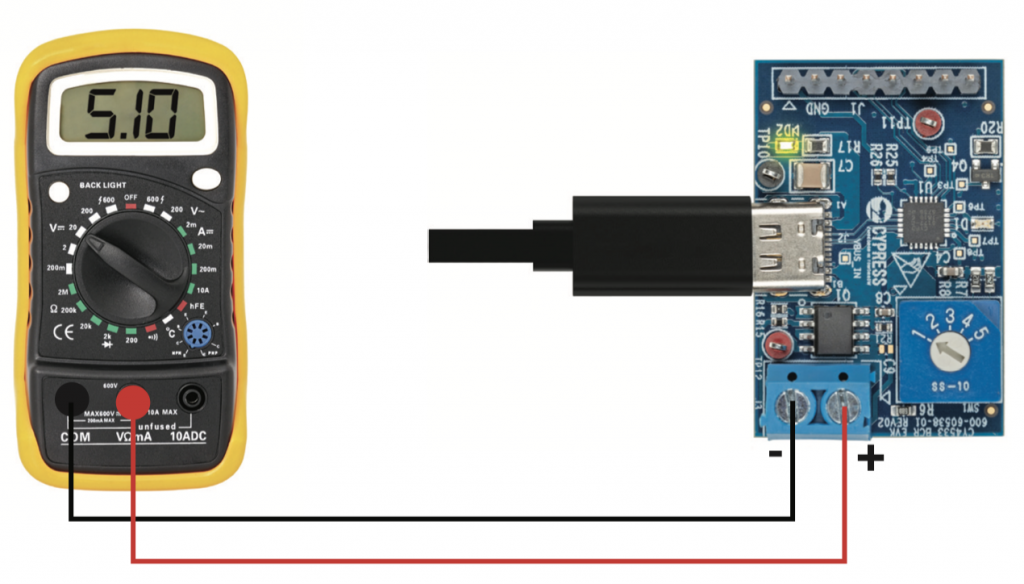
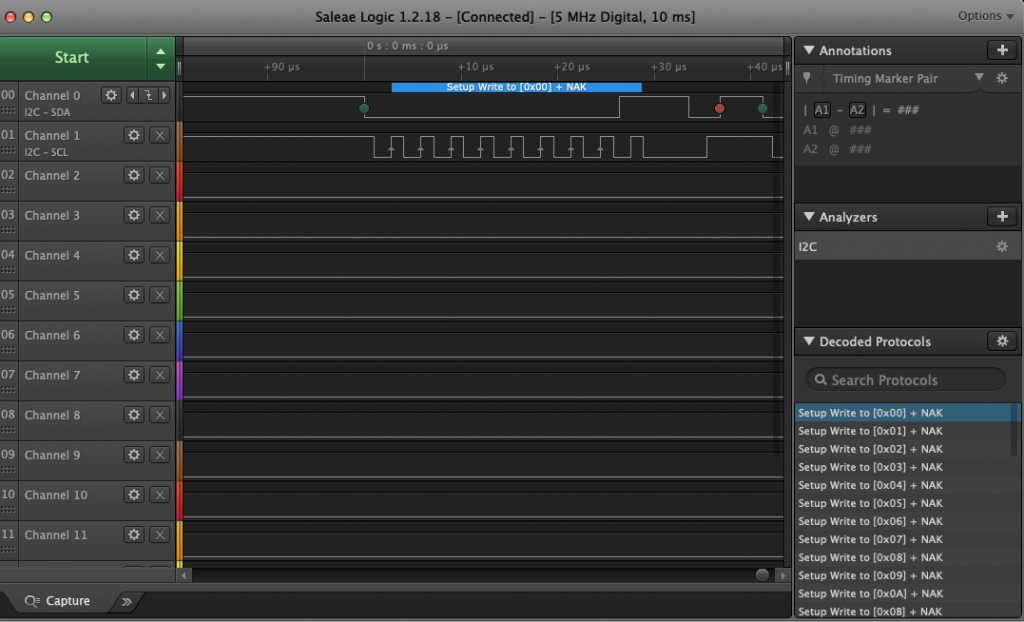
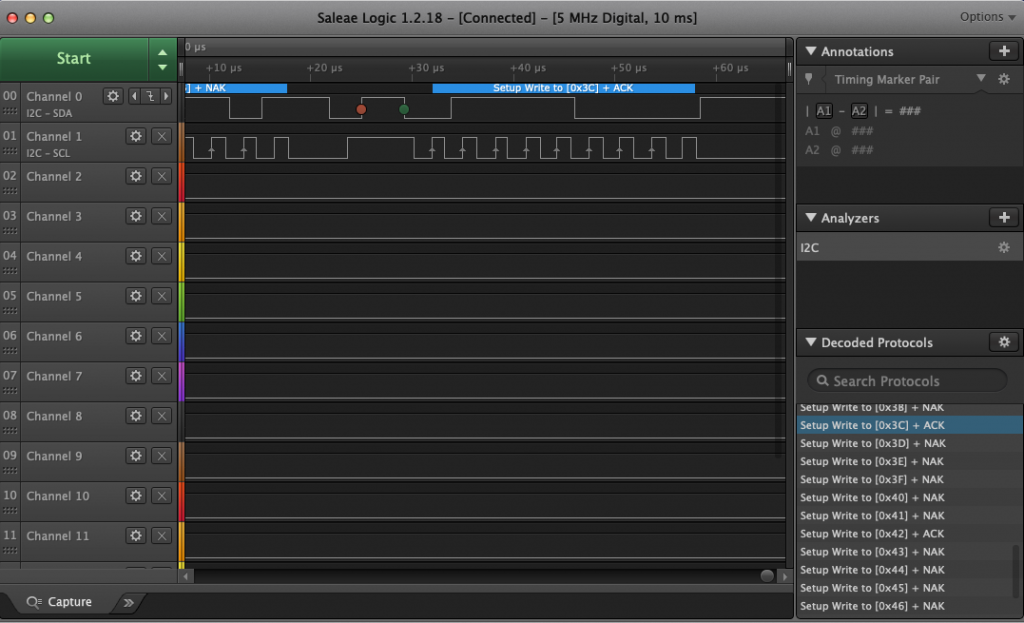
This sensor is a one wire temperature sensor, here is a bit of snapshot from the data sheet.
After reading the data sheet I decided that I really didn’t want to implement a complete library for this sensor. So, I started looking around for a driver library. After googling around a little bit I found a library on GitHub (https://github.com/DavidAntliff/esp32-ds18b20) which looked promising, even though it is ESP32 specific.
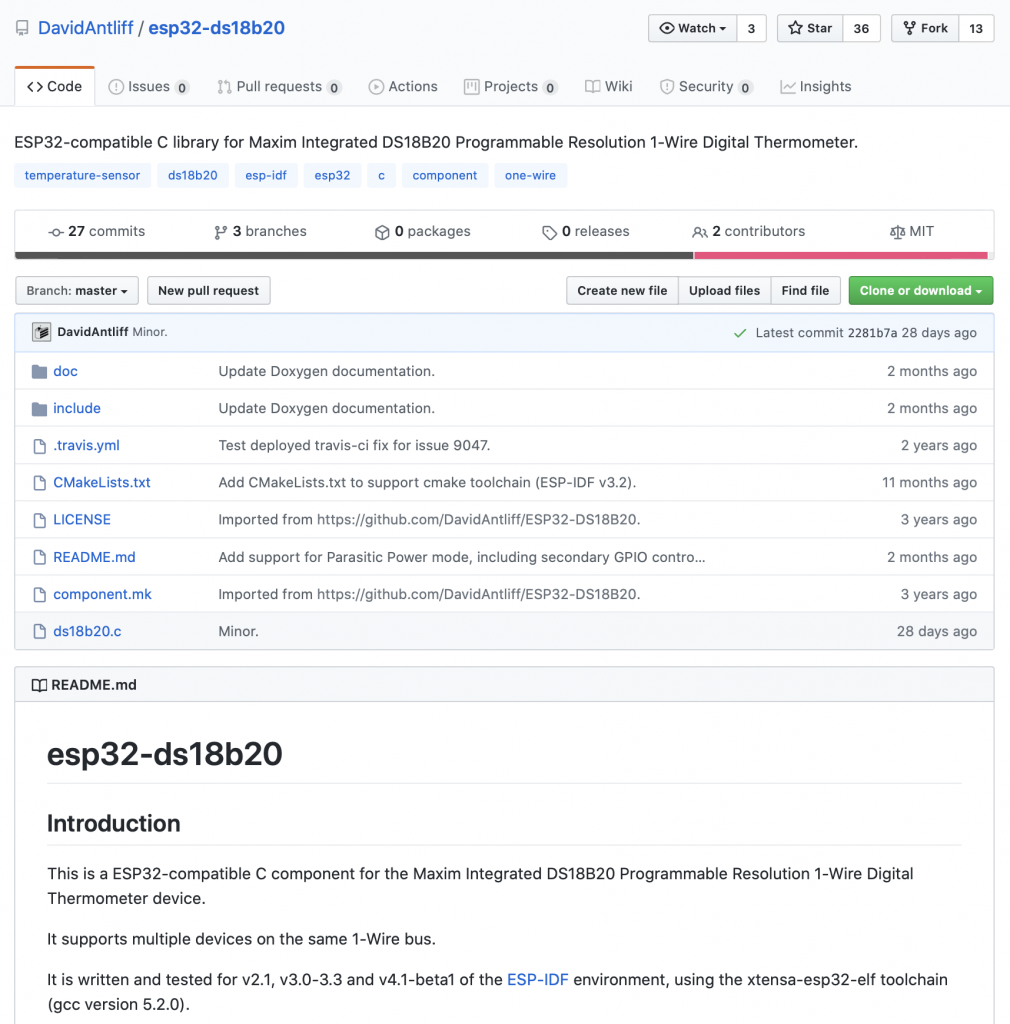
But, after looking at this GitHub library a bit, I decide to start from there.
Before I get started two comments.
- He asked for PSoC 4 … but I am going to do PSoC 6 (because I can use Modus Toolbox). There is no reason why this wouldn’t work on PSoC 4 – but it would take a bit of work
- I can’t think of a good reason to use 1-wire, it sure seems like I2C would be simpler
Build a Base Project
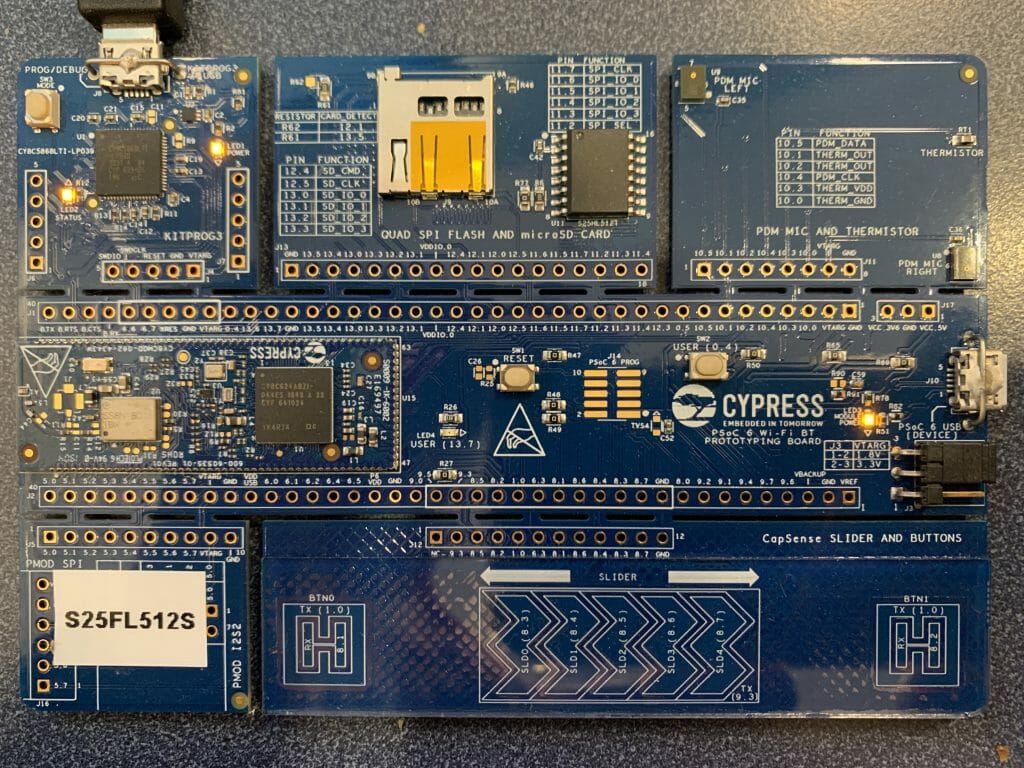
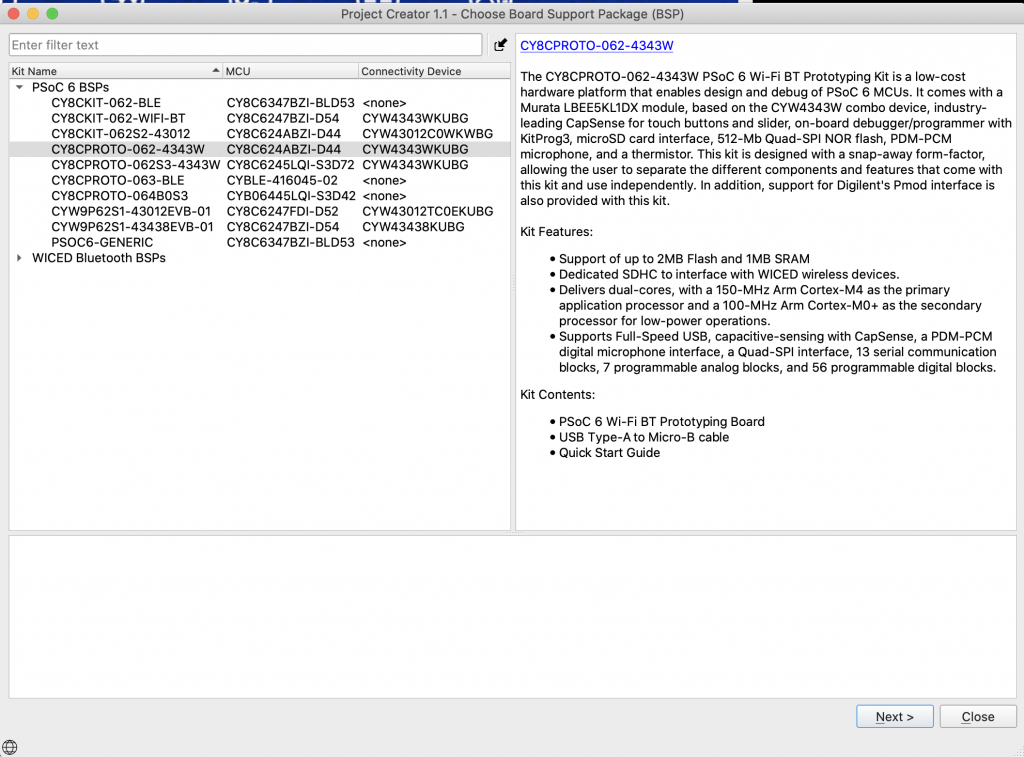
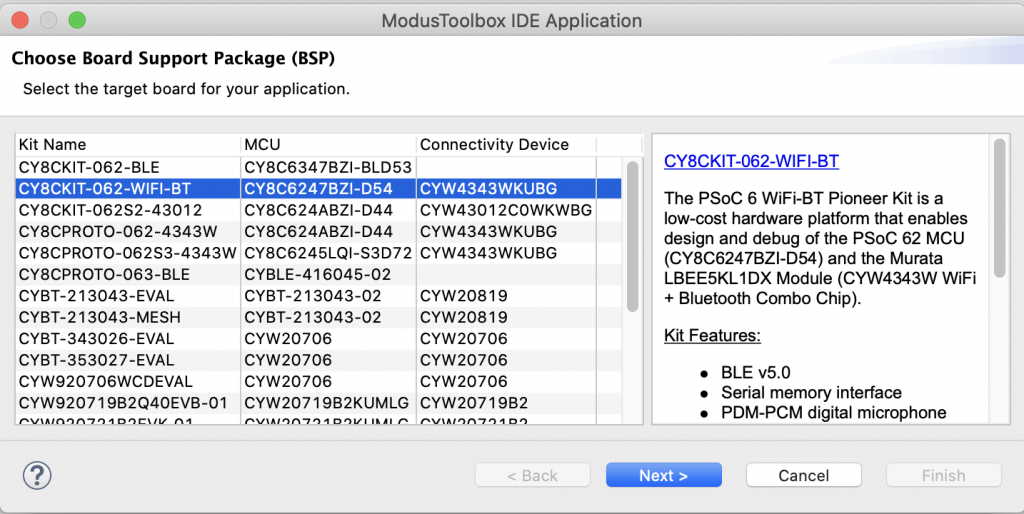
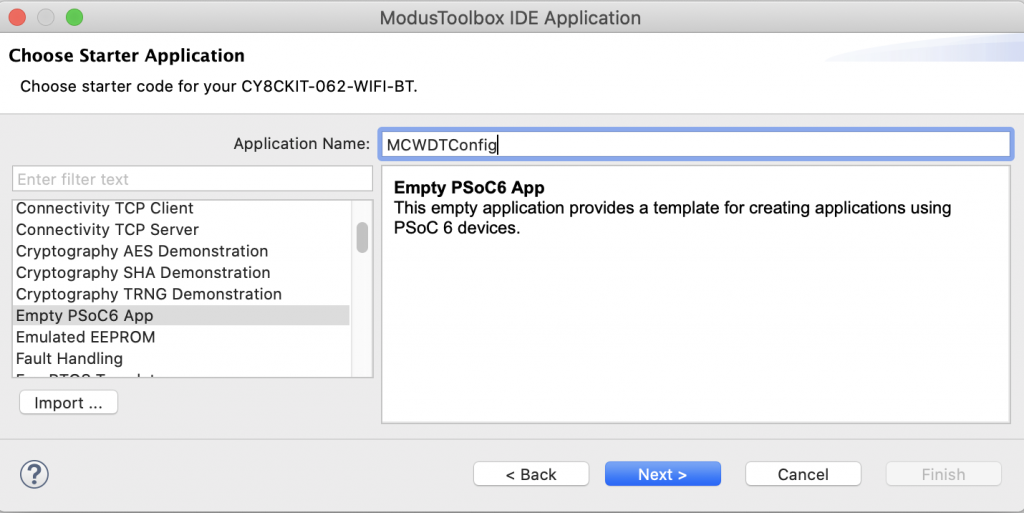
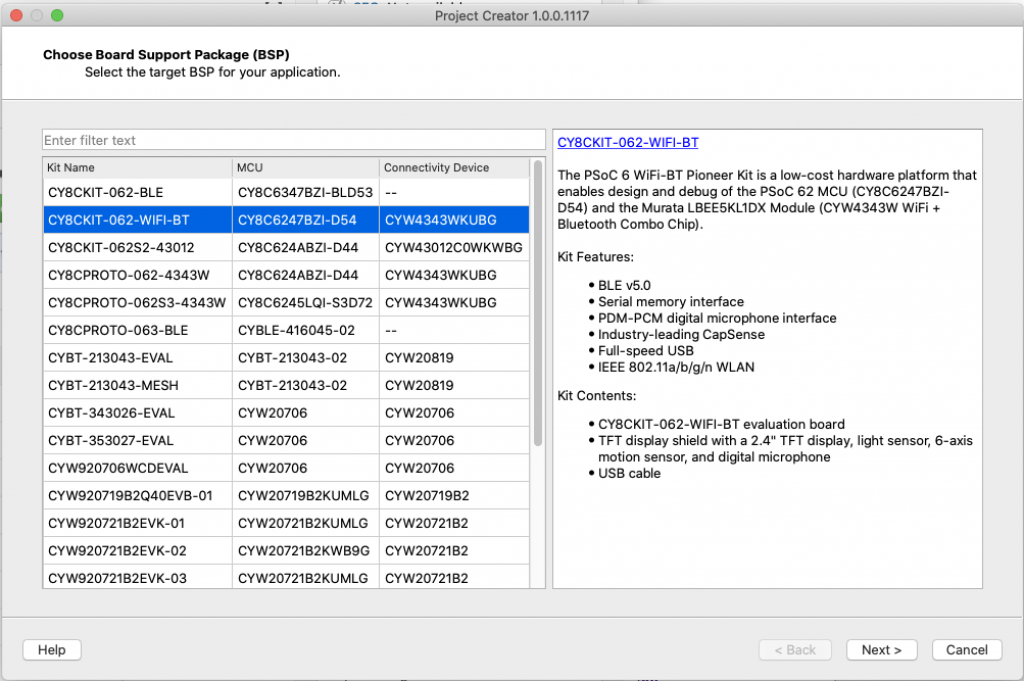
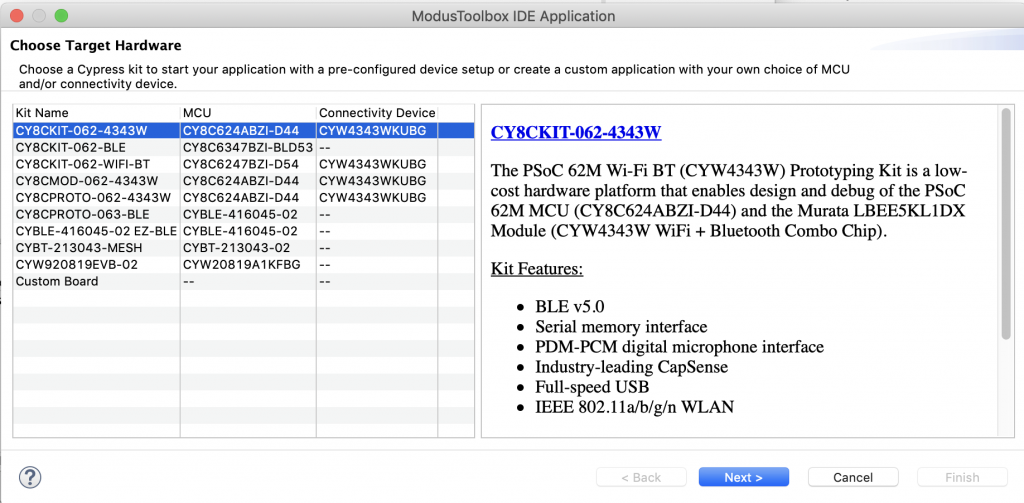
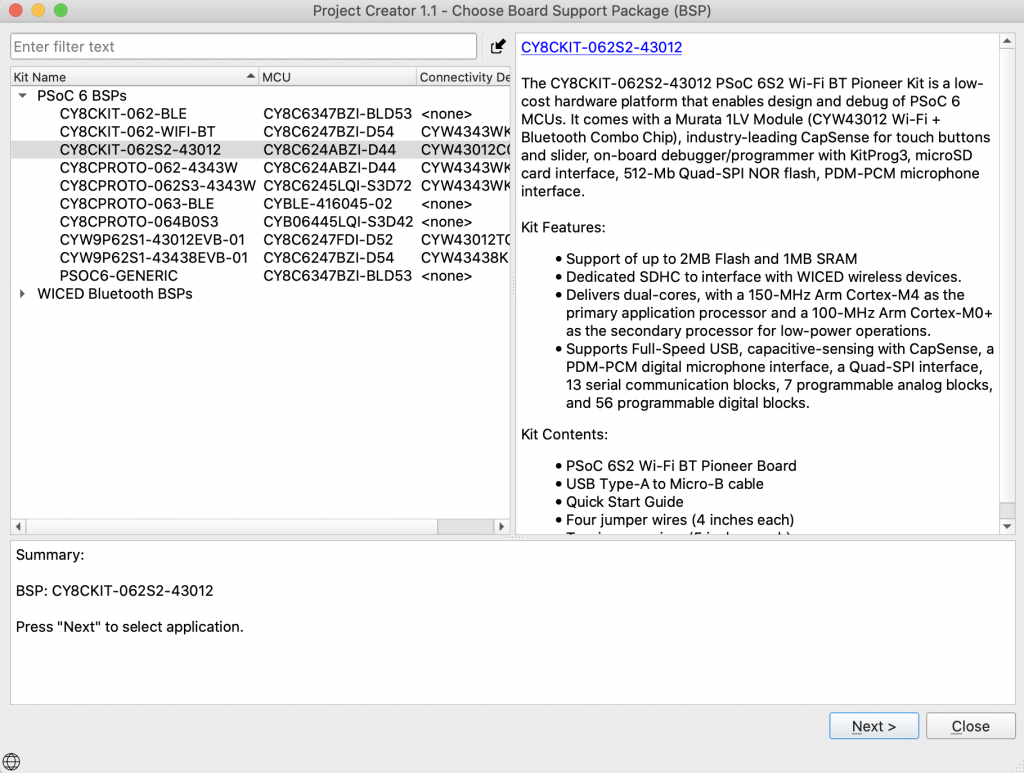
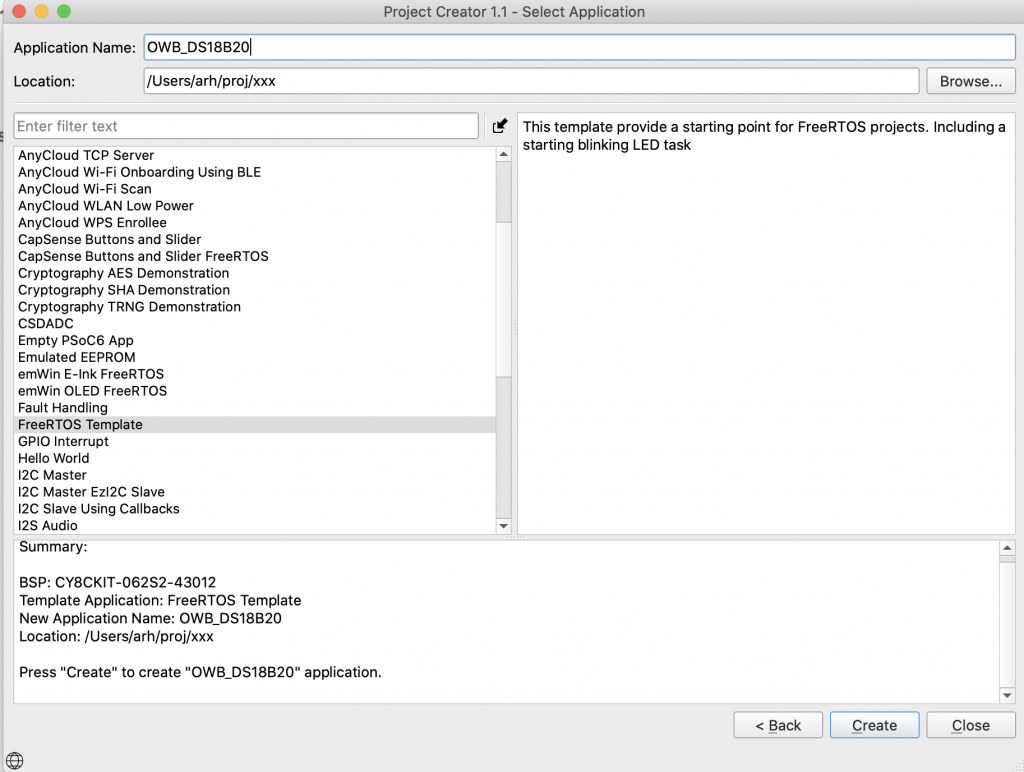
I start this whole effort by creating a new project for the CY8CKIT-062S2-43012 (because that happens to be the kit on my desk at the moment)
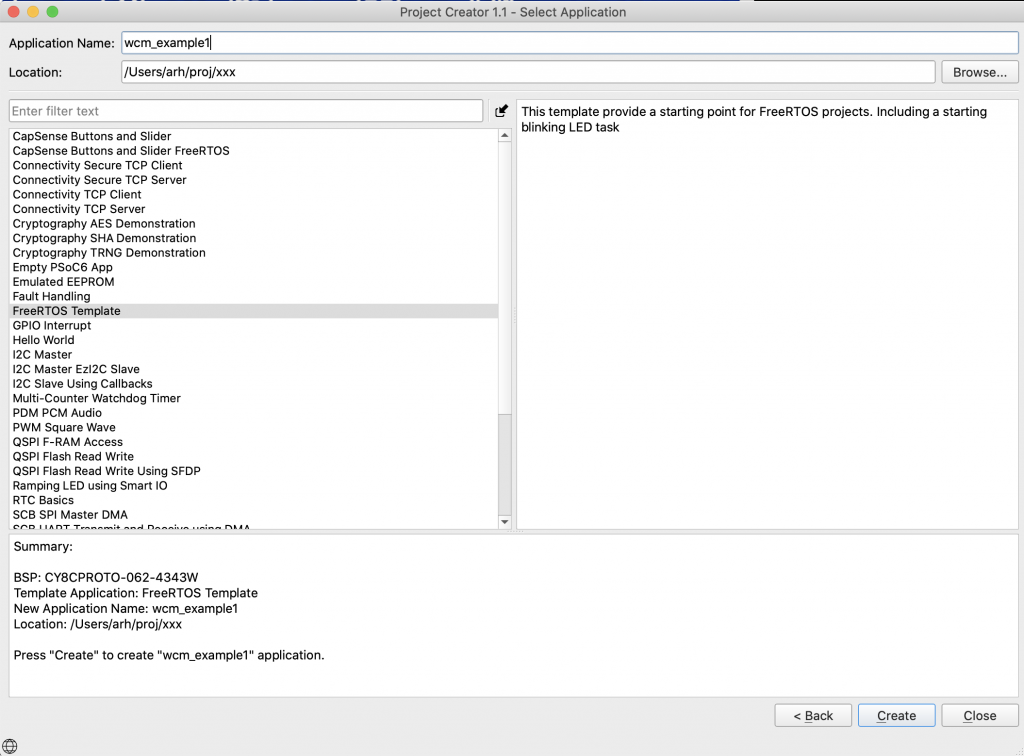
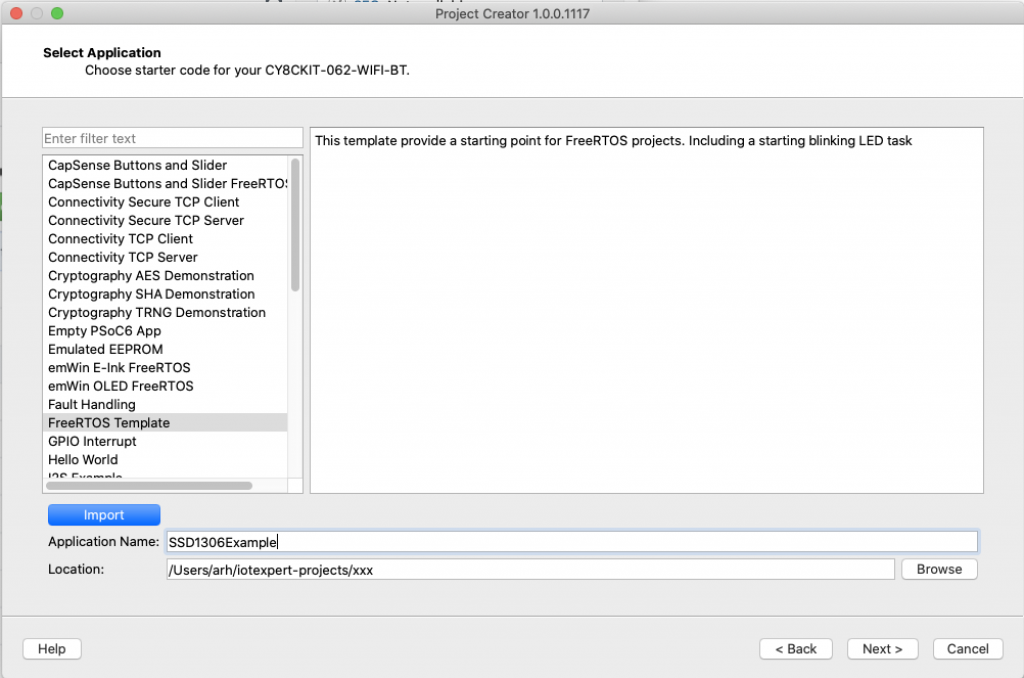
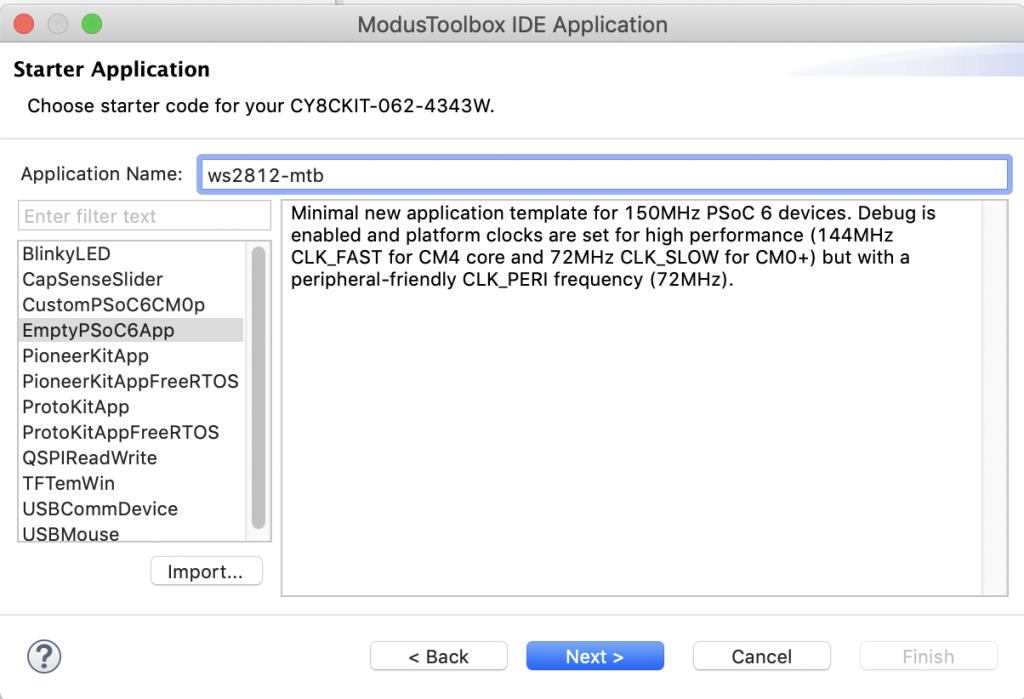
I will use the IoT Expert FreeRTOS Template project
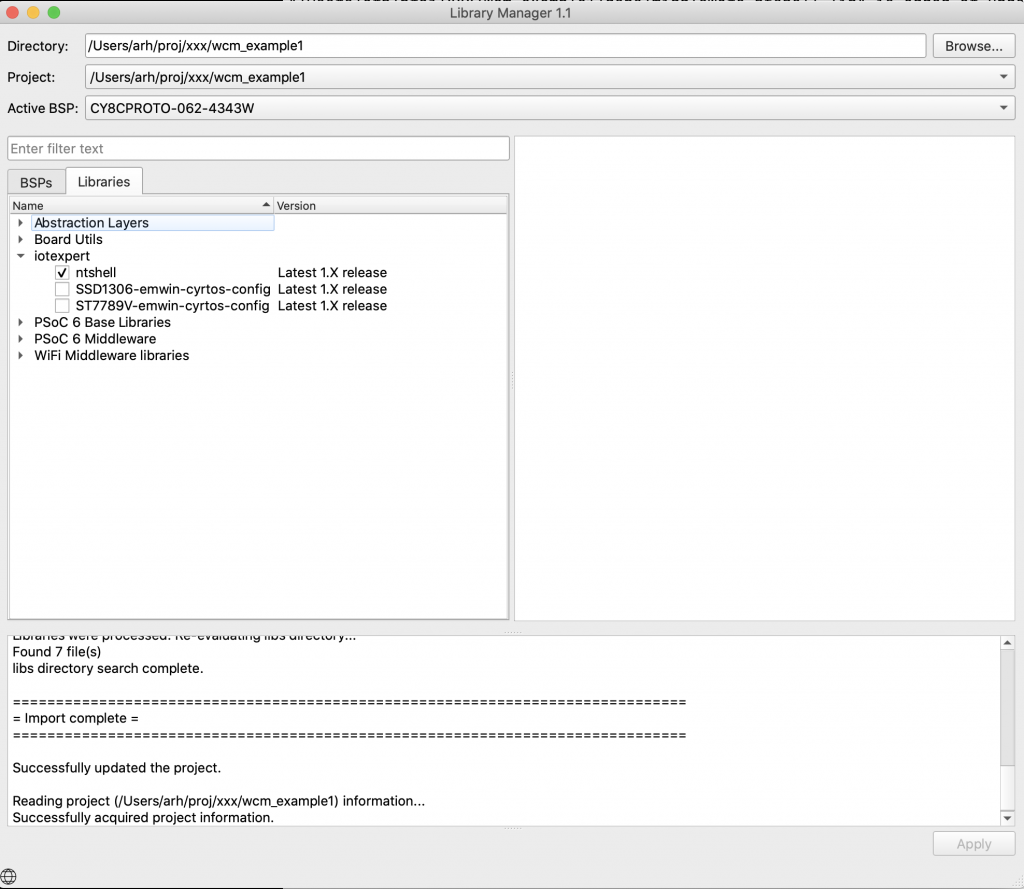
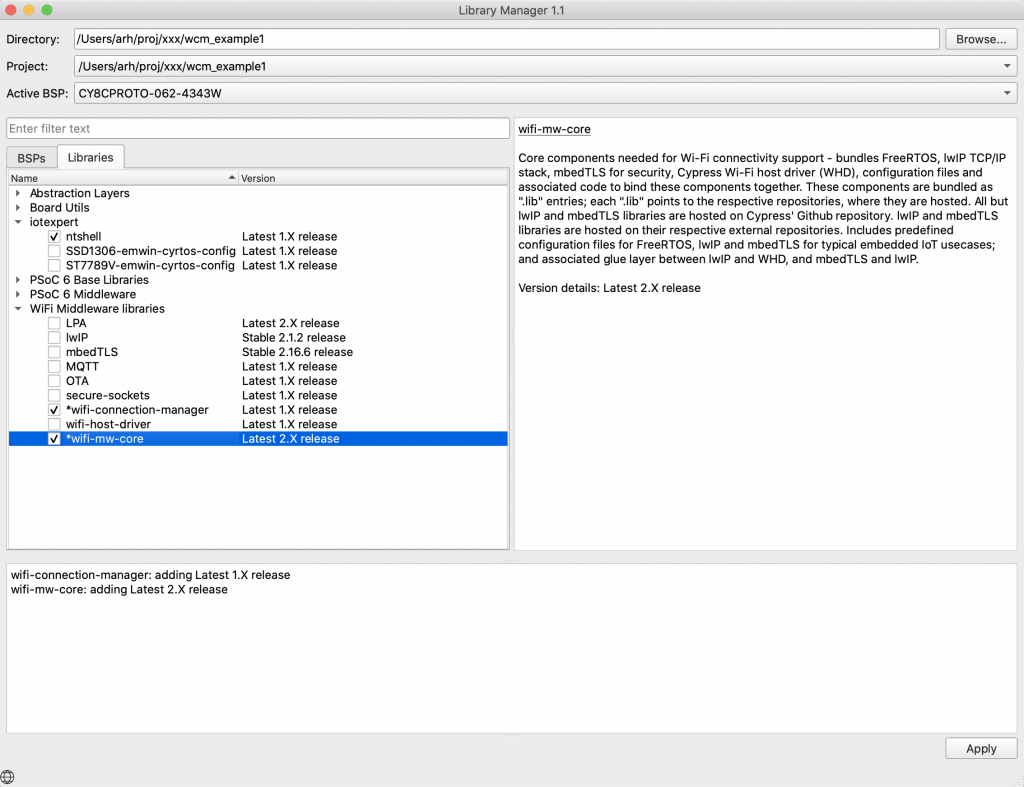
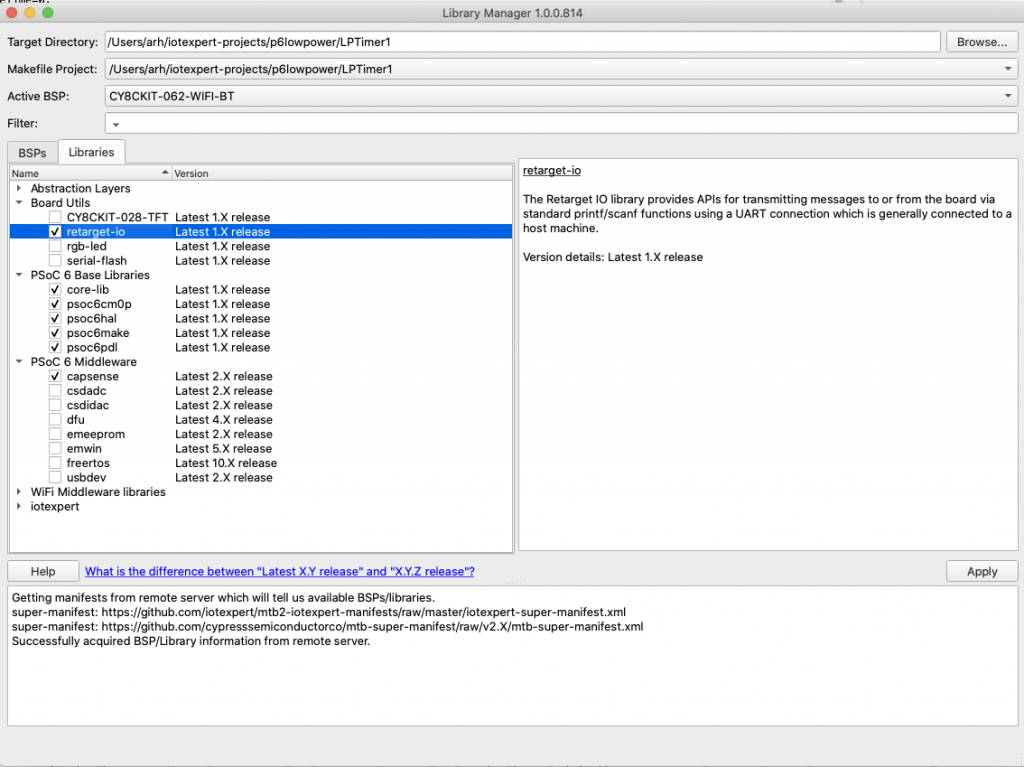
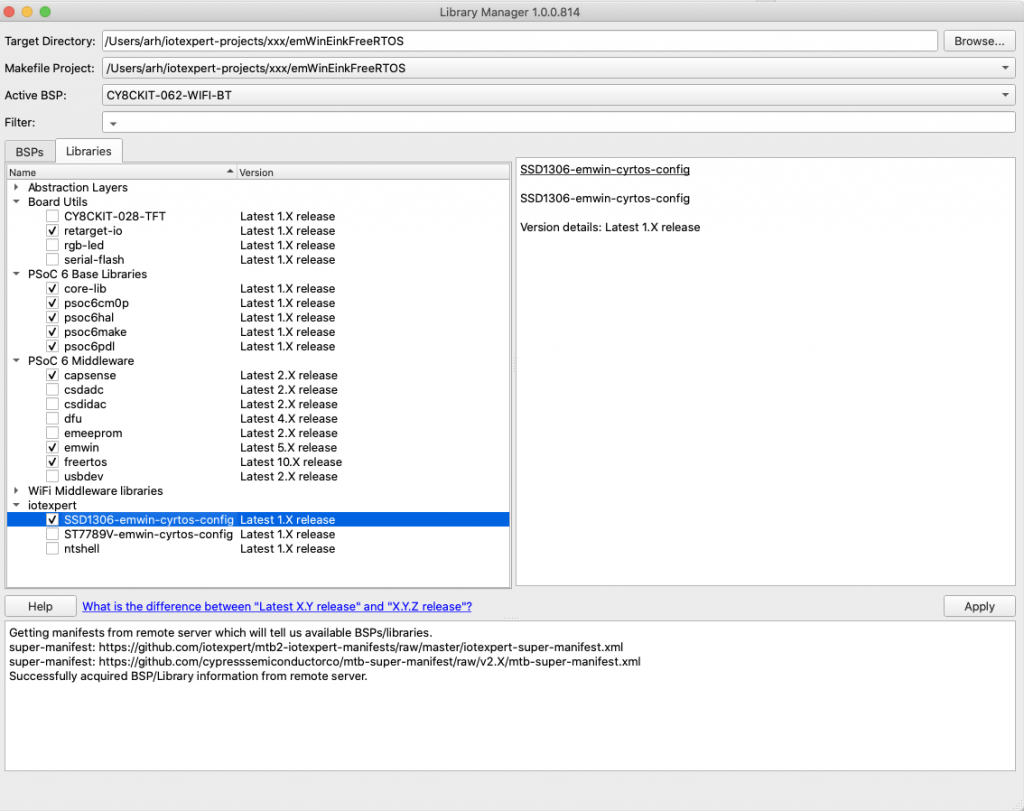
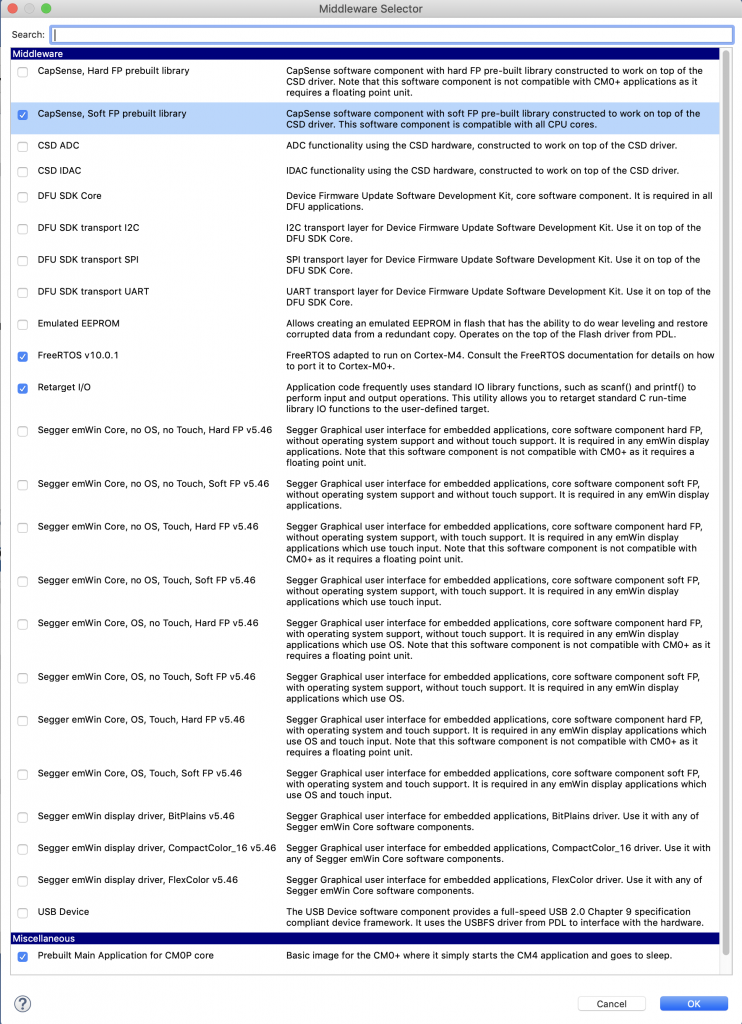
For debugging this whole thing I will use a command line shell. To get this into the project I add the ntshell library. Run “make modlibs” to start the library manager.
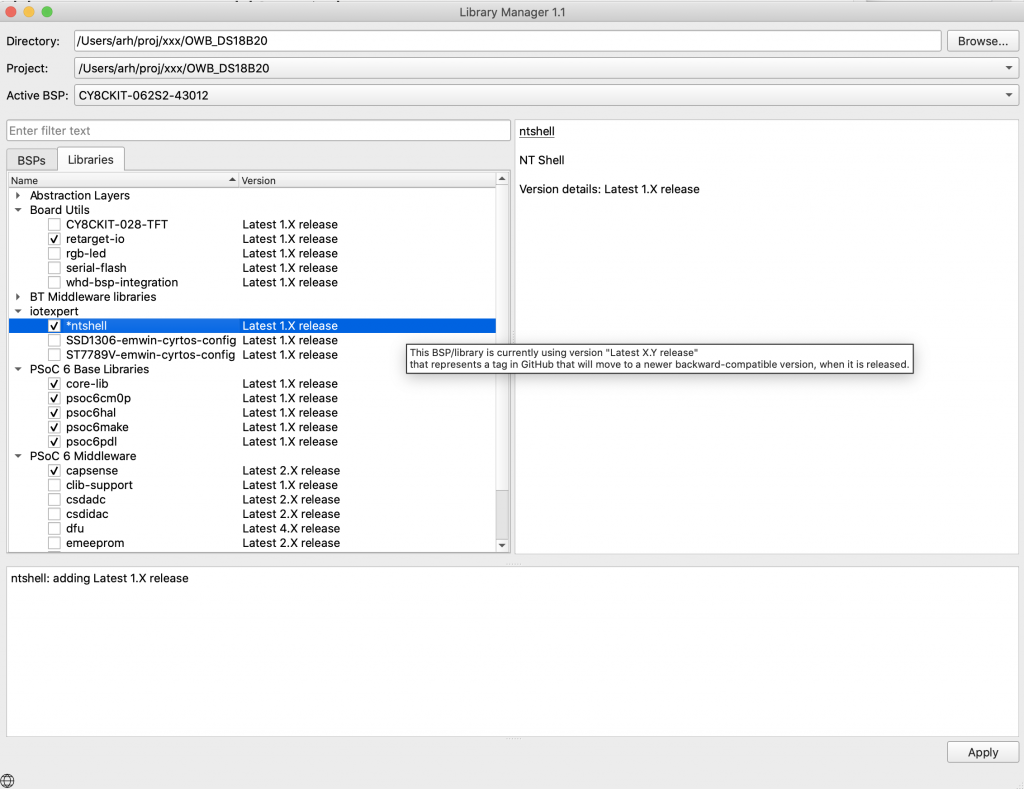
In the library manager pick the “ntshell” library
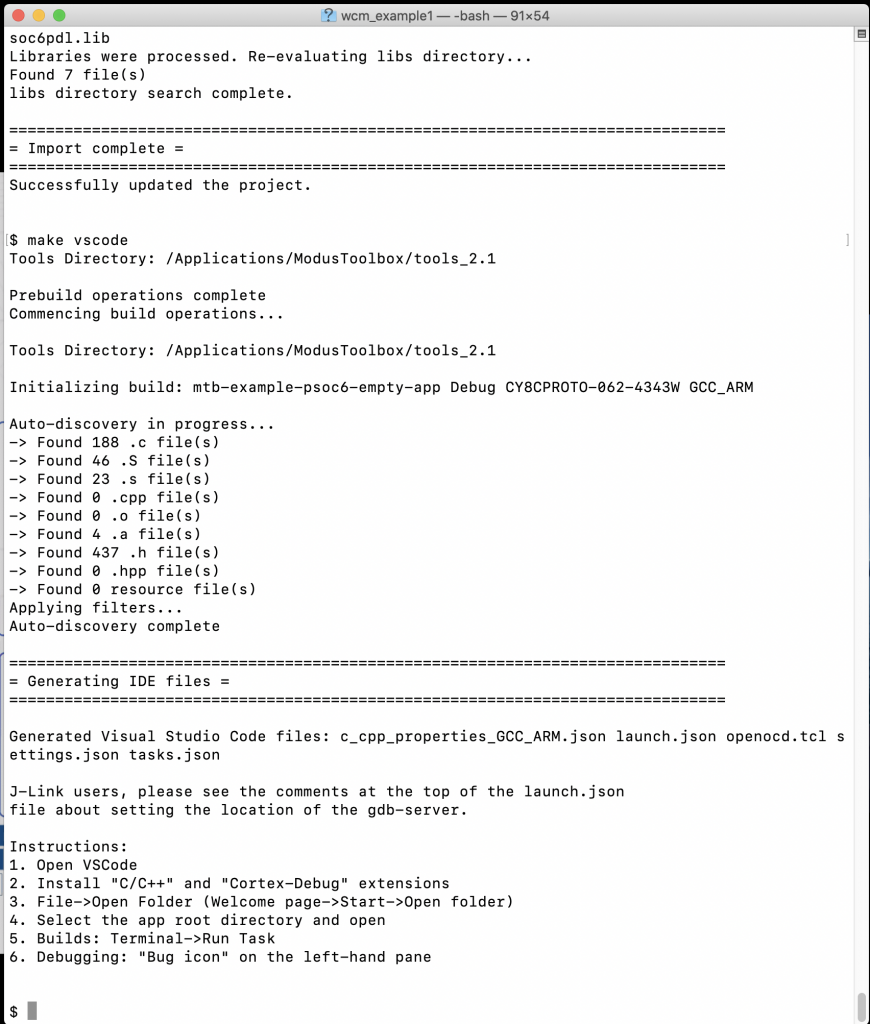
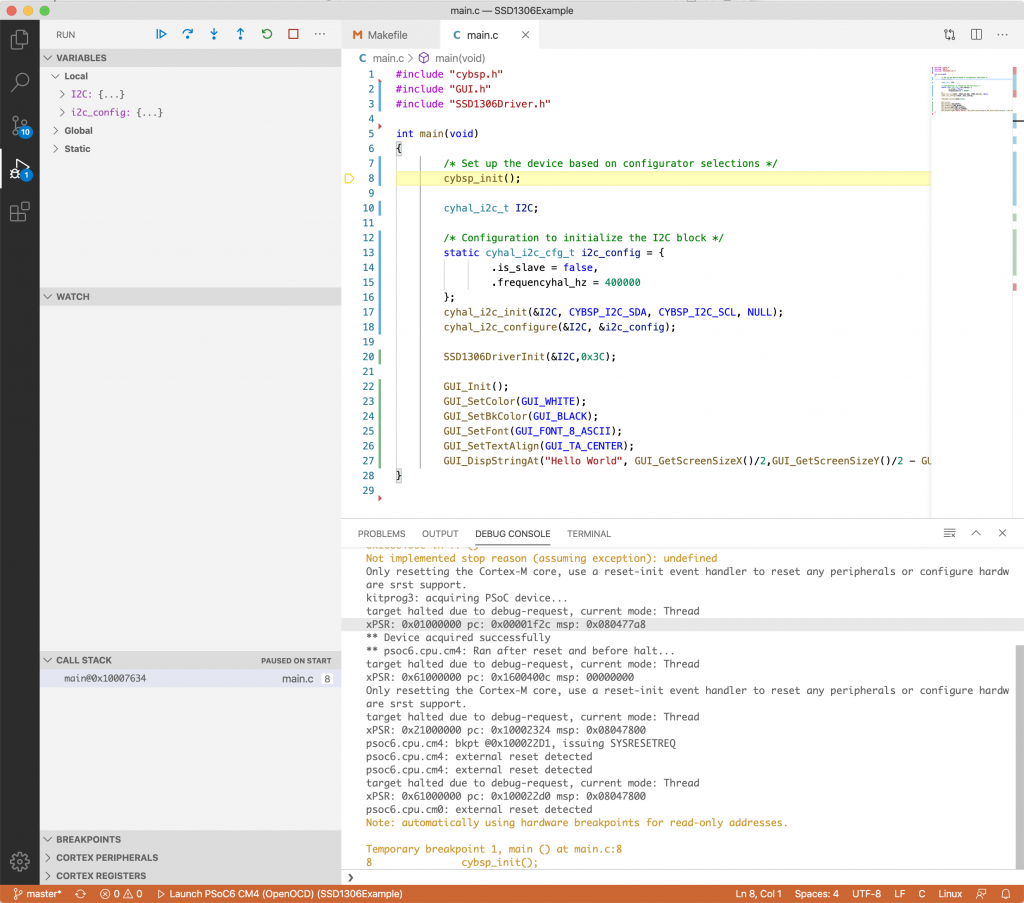
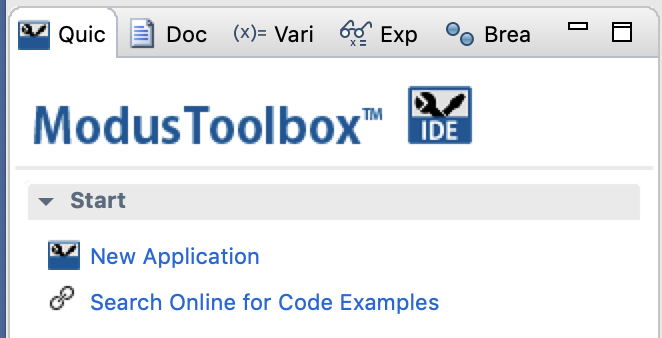
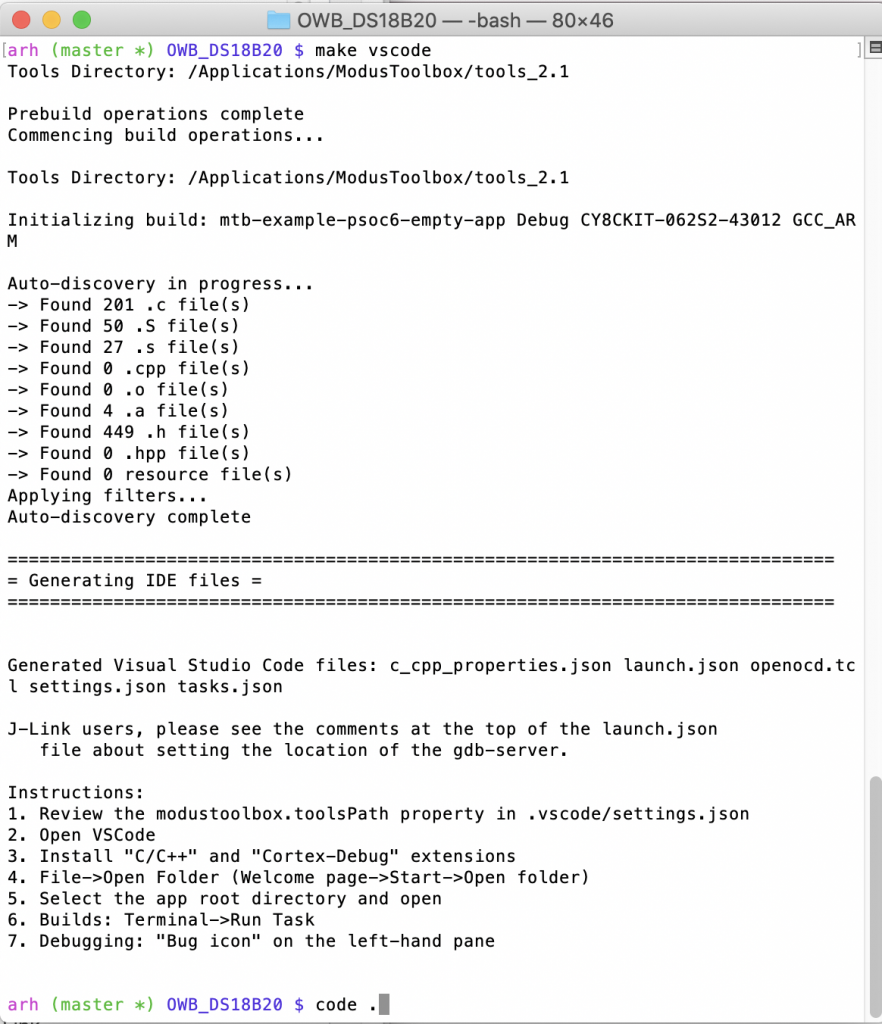
To develop this project I want to use Visual Studio code. So, I run “make vscode” (to create the configuration files) and start vscode by running “code .”
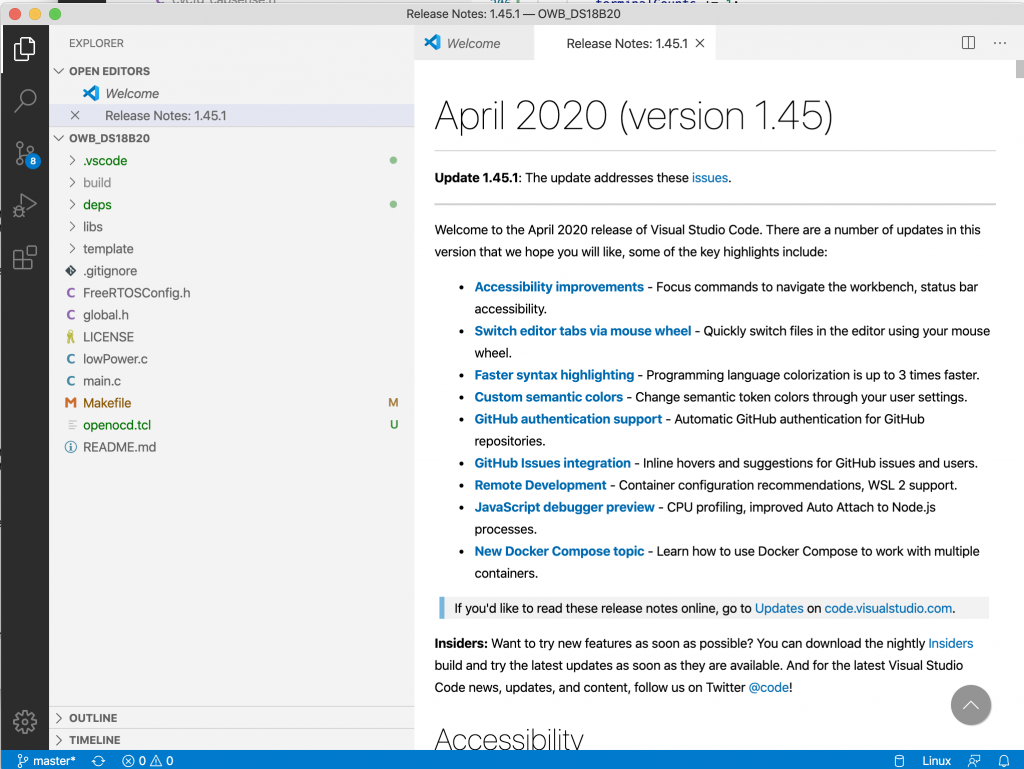
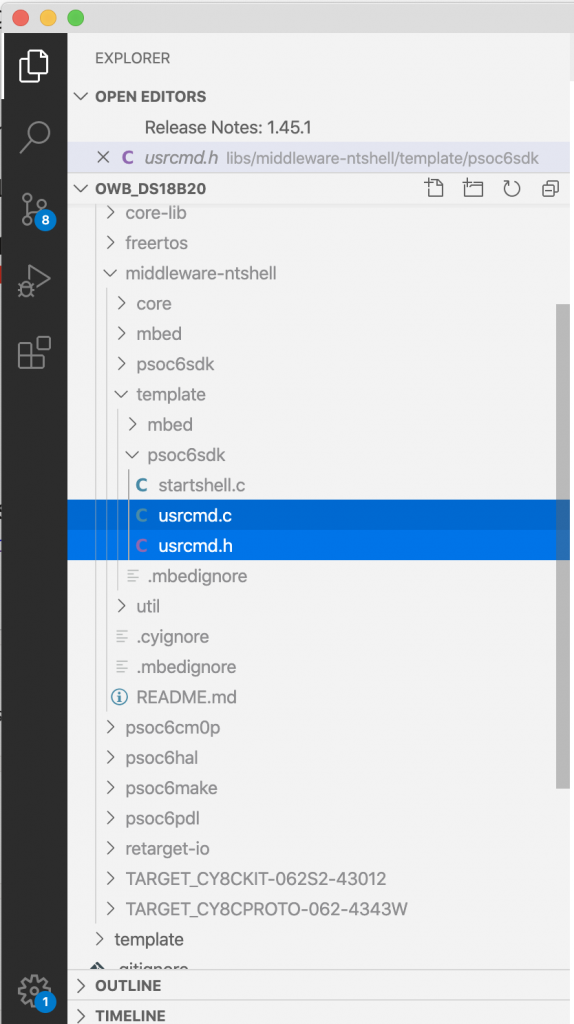
When VSCODE starts up it looks like this:
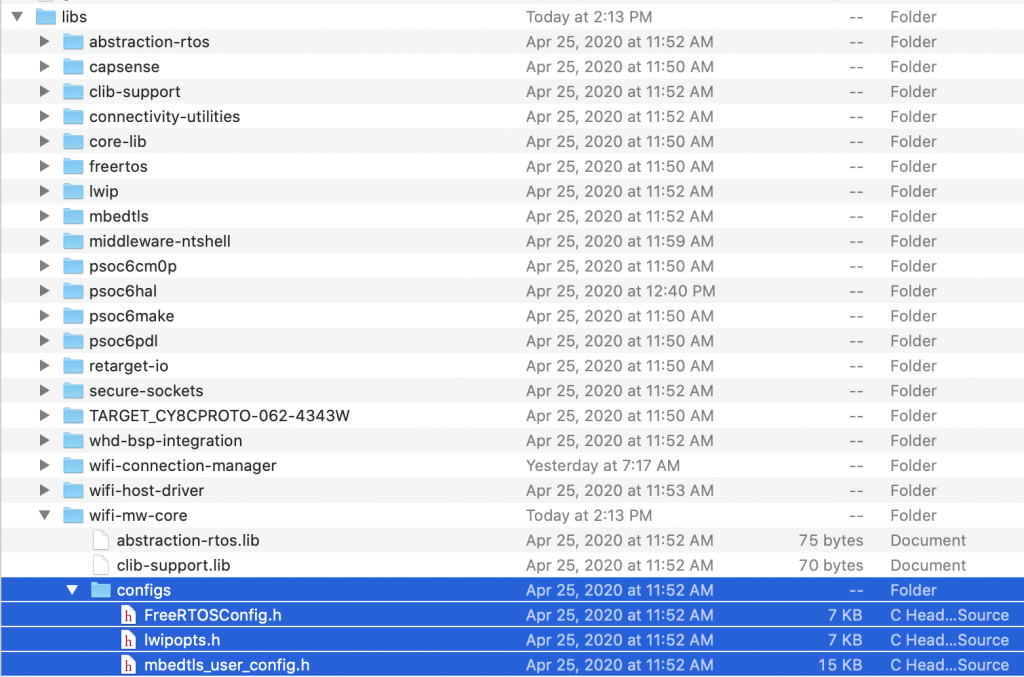
In order to use the ntshell library you need to shuffle the files around a little bit. Move the ntshell.h/.c into the main project by doing a drag/drop in the explorer window.
It will ask you really want to move the files
![]()
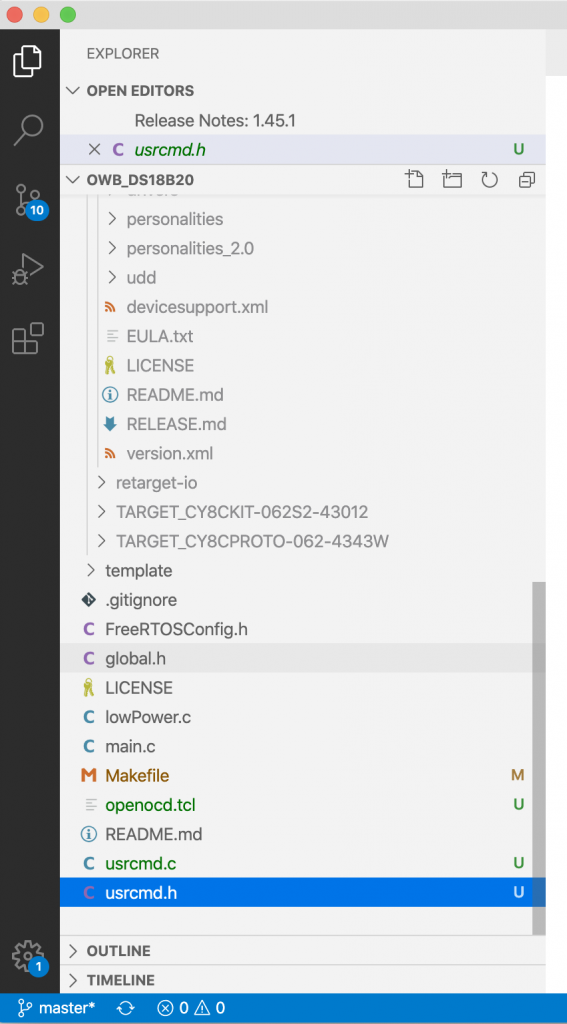
Once it is done, the ntshell functions which you need to customize will be part of the project.
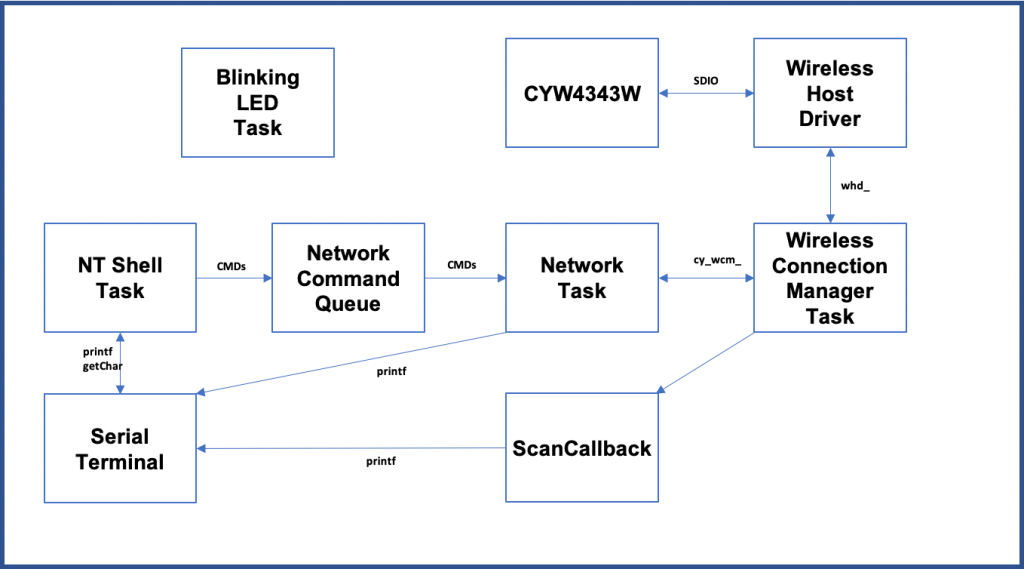
To use the ntshell, you need to add the task to main.c
#include "cy_pdl.h"
#include "cyhal.h"
#include "cybsp.h"
#include "cy_retarget_io.h"
#include <stdio.h>
#include "FreeRTOS.h"
#include "task.h"
#include "ntshell.h"
#include "ntlibc.h"
#include "psoc6_ntshell_port.h"
// Global variable with a handle to the shell
ntshell_t ntshell;
void ntShellTask()
{
printf("Started ntshell\n");
setvbuf(stdin, NULL, _IONBF, 0);
ntshell_init(
&ntshell,
ntshell_read,
ntshell_write,
ntshell_callback,
(void *)&ntshell);
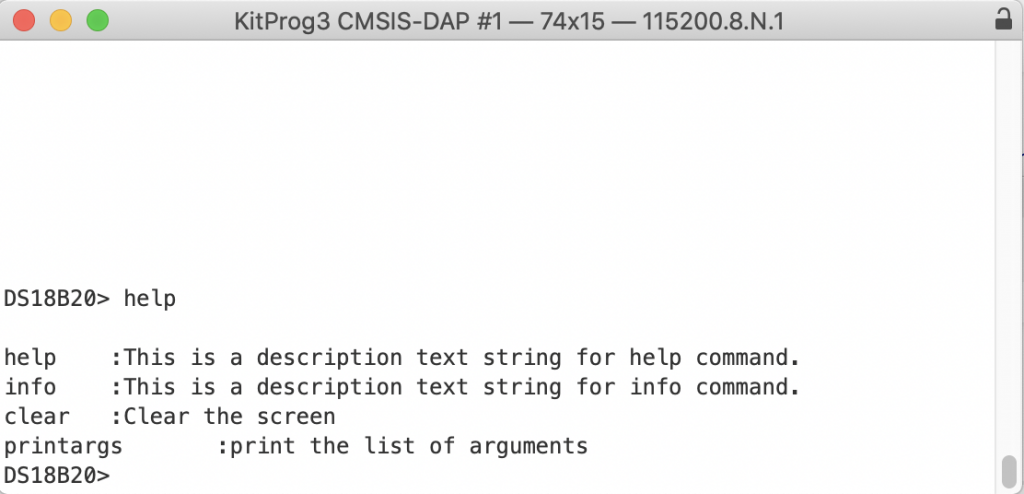
ntshell_set_prompt(&ntshell, "DS18B20> ");
vtsend_erase_display(&ntshell.vtsend);
ntshell_execute(&ntshell);
}
And start the task
xTaskCreate(ntShellTask, "nt shell task", configMINIMAL_STACK_SIZE*2,0 /* args */ ,0 /* priority */, 0);
Build and compile
And you should have a working project.
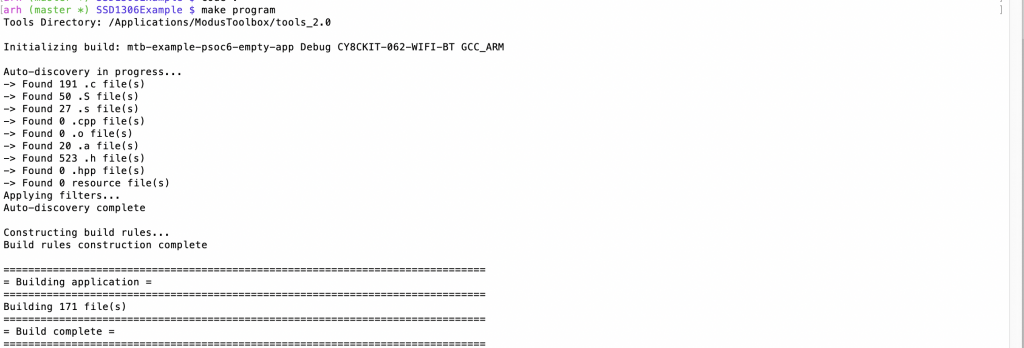
Run “make program” to get the board going
arh (master *) OWB_DS18B20 $ make program
Tools Directory: /Applications/ModusToolbox/tools_2.1
Prebuild operations complete
Commencing build operations...
Tools Directory: /Applications/ModusToolbox/tools_2.1
Initializing build: mtb-example-psoc6-empty-app Debug CY8CKIT-062S2-43012 GCC_ARM
Auto-discovery in progress...
-> Found 202 .c file(s)
-> Found 50 .S file(s)
-> Found 27 .s file(s)
-> Found 0 .cpp file(s)
-> Found 0 .o file(s)
-> Found 4 .a file(s)
-> Found 450 .h file(s)
-> Found 0 .hpp file(s)
-> Found 0 resource file(s)
Applying filters...
Auto-discovery complete
Constructing build rules...
Build rules construction complete
==============================================================================
= Building application =
==============================================================================
Building 181 file(s)
==============================================================================
= Build complete =
==============================================================================
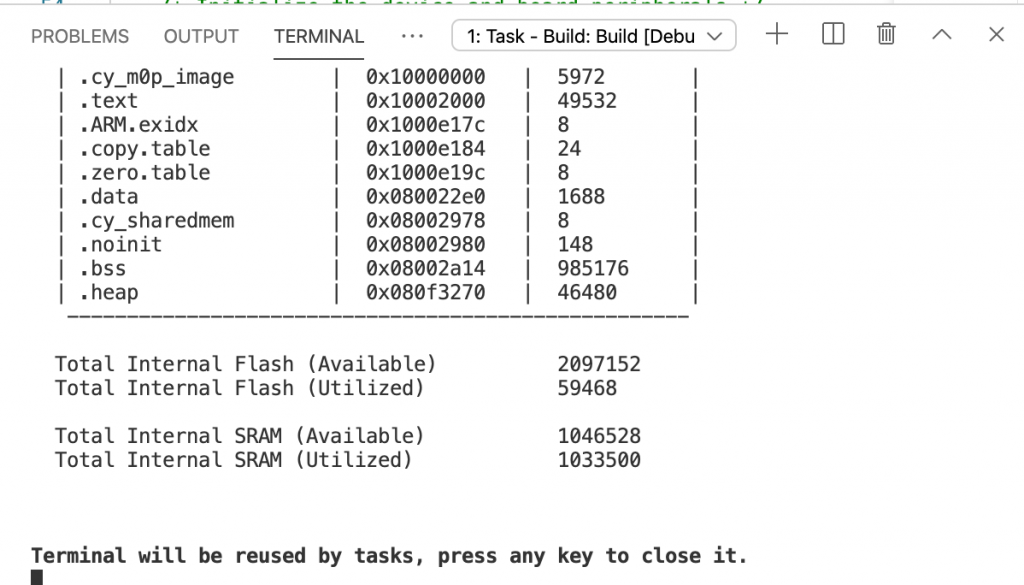
Calculating memory consumption: CY8C624ABZI-D44 GCC_ARM -Og
----------------------------------------------------
| Section Name | Address | Size |
----------------------------------------------------
| .cy_m0p_image | 0x10000000 | 5972 |
| .text | 0x10002000 | 49532 |
| .ARM.exidx | 0x1000e17c | 8 |
| .copy.table | 0x1000e184 | 24 |
| .zero.table | 0x1000e19c | 8 |
| .data | 0x080022e0 | 1688 |
| .cy_sharedmem | 0x08002978 | 8 |
| .noinit | 0x08002980 | 148 |
| .bss | 0x08002a14 | 985176 |
| .heap | 0x080f3270 | 46480 |
----------------------------------------------------
Total Internal Flash (Available) 2097152
Total Internal Flash (Utilized) 59468
Total Internal SRAM (Available) 1046528
Total Internal SRAM (Utilized) 1033500
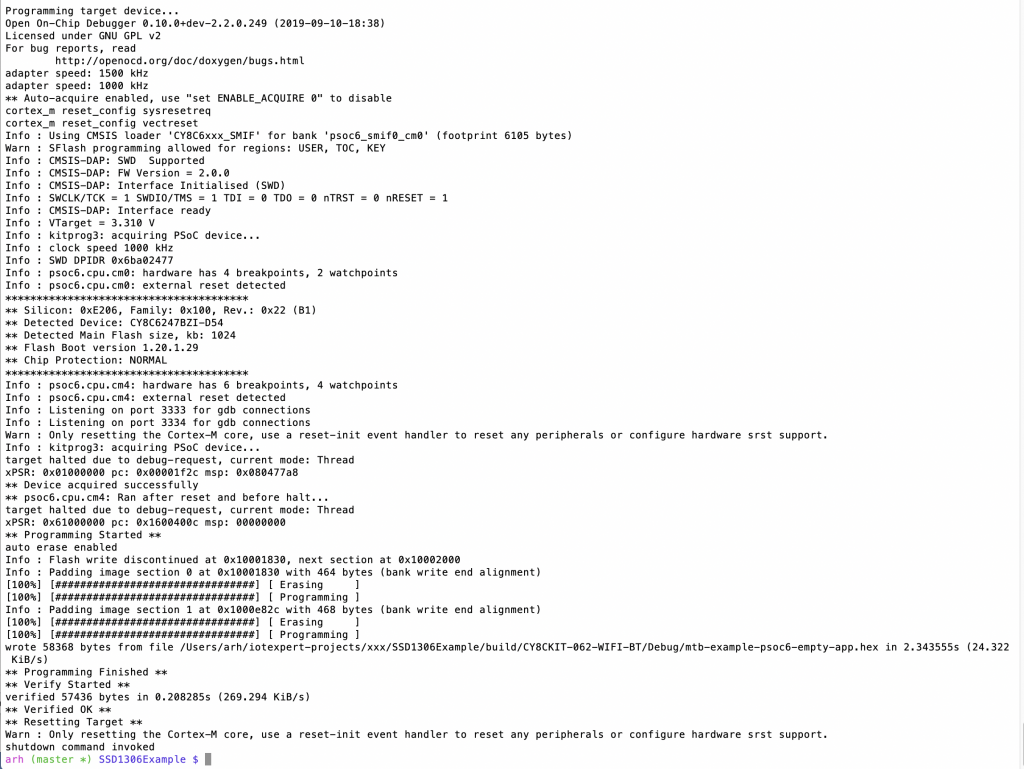
Programming target device...
Open On-Chip Debugger 0.10.0+dev-3.0.0.665 (2020-03-20-17:12)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Info : auto-selecting first available session transport "swd". To override use 'transport select <transport>'.
adapter speed: 2000 kHz
** Auto-acquire enabled, use "set ENABLE_ACQUIRE 0" to disable
cortex_m reset_config sysresetreq
cortex_m reset_config sysresetreq
Info : Using CMSIS loader 'CY8C6xxA_SMIF' for bank 'psoc6_smif0_cm0' (footprint 6485 bytes)
Warn : SFlash programming allowed for regions: USER, TOC, KEY
Info : CMSIS-DAP: SWD Supported
Info : CMSIS-DAP: FW Version = 2.0.0
Info : CMSIS-DAP: Interface Initialised (SWD)
Info : SWCLK/TCK = 1 SWDIO/TMS = 1 TDI = 0 TDO = 0 nTRST = 0 nRESET = 1
Info : CMSIS-DAP: Interface ready
Info : KitProg3: FW version: 1.11.159
Info : KitProg3: Pipelined transfers disabled, please update the firmware
Warn : *******************************************************************************************
Warn : * KitProg firmware is out of date, please update to the latest version using fw-loader at *
Warn : * ModusToolbox/tools/fw-loader *
Warn : *******************************************************************************************
Info : VTarget = 3.263 V
Info : kitprog3: acquiring PSoC device...
Info : clock speed 2000 kHz
Info : SWD DPIDR 0x6ba02477
Info : psoc6.cpu.cm0: hardware has 4 breakpoints, 2 watchpoints
Info : psoc6.cpu.cm0: external reset detected
***************************************
** Silicon: 0xE402, Family: 0x102, Rev.: 0x11 (A0)
** Detected Device: CY8C624ABZI-S2D44A0
** Detected Main Flash size, kb: 2048
** Flash Boot version: 3.1.0.45
** Chip Protection: NORMAL
***************************************
Info : psoc6.cpu.cm4: hardware has 6 breakpoints, 4 watchpoints
Info : psoc6.cpu.cm4: external reset detected
Info : Listening on port 3333 for gdb connections
Info : Listening on port 3334 for gdb connections
Info : kitprog3: acquiring PSoC device...
target halted due to debug-request, current mode: Thread
xPSR: 0x41000000 pc: 0x00000190 msp: 0x080ff800
** Device acquired successfully
** psoc6.cpu.cm4: Ran after reset and before halt...
target halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x0000012a msp: 0x080ff800
** Programming Started **
auto erase enabled
Info : Flash write discontinued at 0x10001754, next section at 0x10002000
Info : Padding image section 0 at 0x10001754 with 172 bytes (bank write end alignment)
[100%] [################################] [ Erasing ]
[100%] [################################] [ Programming ]
Info : Padding image section 1 at 0x1000e844 with 444 bytes (bank write end alignment)
[100%] [################################] [ Erasing ]
[100%] [################################] [ Programming ]
wrote 57856 bytes from file /Users/arh/proj/xxx/OWB_DS18B20/build/CY8CKIT-062S2-43012/Debug/mtb-example-psoc6-empty-app.hex in 2.294771s (24.621 KiB/s)
** Programming Finished **
** Verify Started **
verified 57240 bytes in 0.155447s (359.598 KiB/s)
** Verified OK **
** Resetting Target **
shutdown command invoked
arh (master *) OWB_DS18B20 $
And you should have a working project (with a blinking led and a command line)
Add the DS18B20 Library
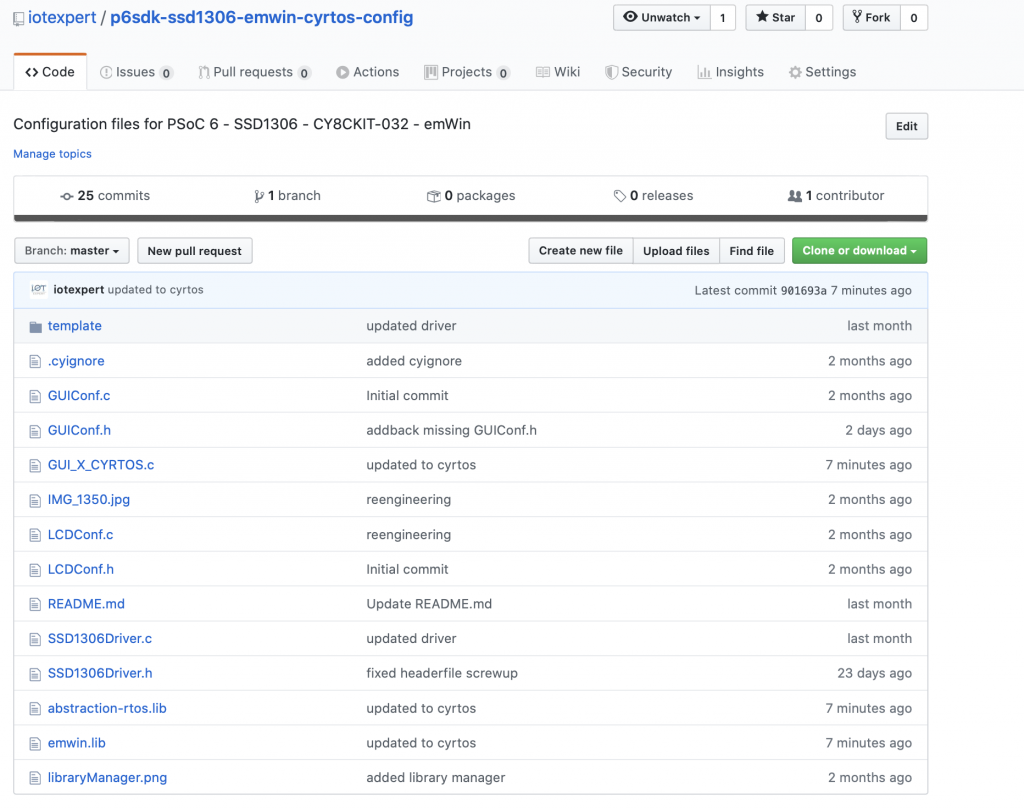
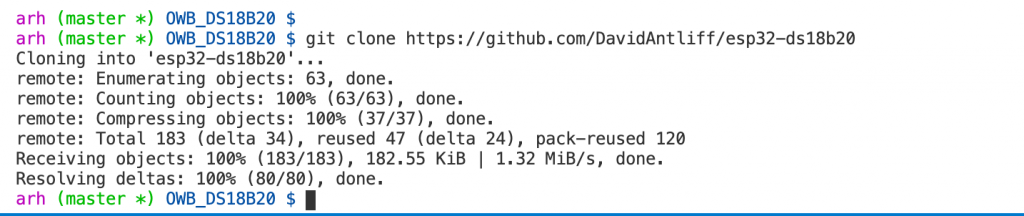
Now that I have a working project the next step is to clone the DS18B20 library into my project. This is done using
- git clone https://github.com/DavidAntliff/esp32-ds18b20
The next step is to establish how bad things are with the new library. So run the compiler.
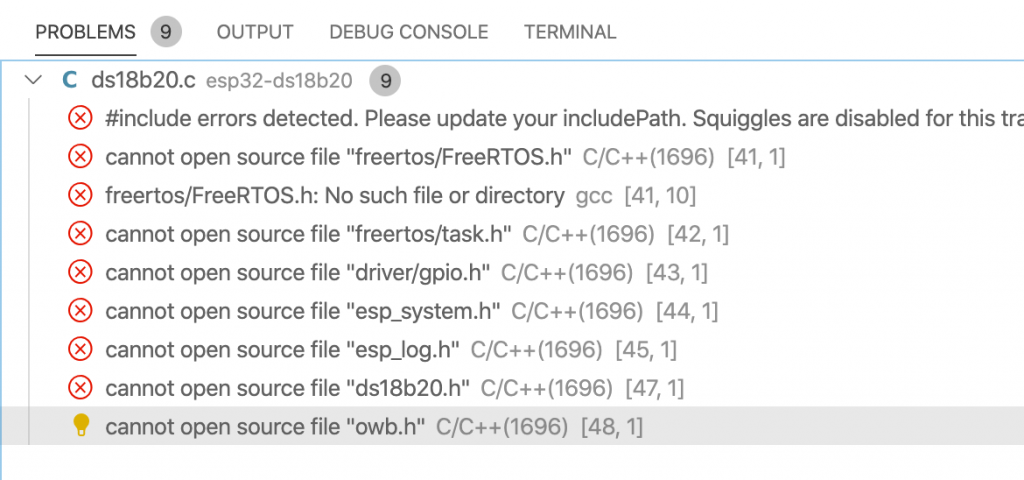
When I look at the ds18b20.c file I can see that there are some obvious problems
#include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "driver/gpio.h" #include "esp_system.h" #include "esp_log.h" #include "ds18b20.h" #include "owb.h"
Fix those:
#include "FreeRTOS.h" #include "task.h" //#include "driver/gpio.h" //#include "esp_system.h" //#include "esp_log.h" #include "ds18b20.h" //#include "owb.h"
Run the compiler again. Now I am missing owb.h which is the public header file for the one wire bus.
In file included from esp32-ds18b20/ds18b20.c:47:0: ./esp32-ds18b20/include/ds18b20.h:37:10: fatal error: owb.h: No such file or directory #include "owb.h"
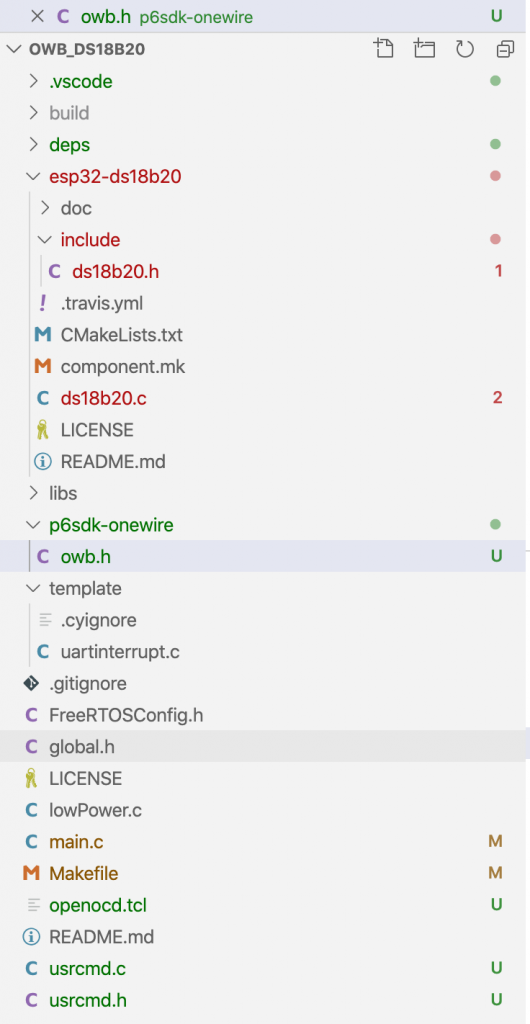
I now make a directory to hold the new owb files called “p6sdk-onewire”. Then I add a file “owb.h” (as a blank file)
When I run the compiler again, there are now two classes or error … owb and esp32 logging function. Here is an example of the ESP_ problems.
esp32-ds18b20/ds18b20.c:249:17: warning: implicit declaration of function 'ESP_LOG_BUFFER_HEX_LEVEL' [-Wimplicit-function-declaration]
ESP_LOG_BUFFER_HEX_LEVEL(TAG, scratchpad, count, ESP_LOG_DEBUG);
^~~~~~~~~~~~~~~~~~~~~~~~
esp32-ds18b20/ds18b20.c:249:66: error: 'ESP_LOG_DEBUG' undeclared (first use in this function)
ESP_LOG_BUFFER_HEX_LEVEL(TAG, scratchpad, count, ESP_LOG_DEBUG);
And here is an example of the owb problems.
esp32-ds18b20/ds18b20.c: In function 'ds18b20_wait_for_conversion':
esp32-ds18b20/ds18b20.c:504:30: error: request for member 'use_parasitic_power' in something not a structure or union
if (ds18b20_info->bus->use_parasitic_power)
^~
esp32-ds18b20/ds18b20.c: At top level:
esp32-ds18b20/ds18b20.c:568:54: error: unknown type name 'OneWireBus'
DS18B20_ERROR ds18b20_check_for_parasite_power(const OneWireBus * bus, bool * present)
^~~~~~~~~~
esp32-ds18b20/ds18b20.c: In function 'ds18b20_check_for_parasite_power':
esp32-ds18b20/ds18b20.c:577:44: error: 'OWB_ROM_SKIP' undeclared (first use in this function); did you mean 'CY_ROM_SIZE'?
if ((err = owb_write_byte(bus, OWB_ROM_SKIP)) == DS18B20_OK)
^~~~~~~~~~~~
CY_ROM_SIZE
make[1]: *** [/Users/arh/proj/xxx/OWB_DS18B20/build/CY8CKIT-062S2-4301
To make this thing go, I edit ds18b20.c file and add logging templates (just stub functions that don’t do anything)
void ESP_LOGD(const char * code, char *val,...)
{
}
void ESP_LOGE(const char * code, ...)
{
}
void ESP_LOGW(const char *code,...)
{
}
#define ESP_LOG_DEBUG 0
void ESP_LOG_BUFFER_HEX_LEVEL(const char *code,...)
{
}
uint64_t esp_timer_get_time()
{
return 0;
}
Create owb.h
If I was smart, I would have started with David Antliff “owb” library. But I don’t. What I do is search through “ds18b20.c” and find every function call to owb_ and then copy those function calls into owb.h (my new file). Then I fix the function calls to have correct prototypes based on what I see in the ds18b20 library. Here is what my owb.h file looks like after that process.
#ifndef OWB_H
#define OWB_H
#ifdef __cplusplus
extern "C" {
#endif
#define OWB_ROM_MATCH 0
#define OWB_ROM_SKIP 0
#include <stdint.h>
#include "cyhal.h"
#include "FreeRTOS.h"
#include "semphr.h"
typedef struct
{
cyhal_gpio_t pin;
bool use_parasitic_power;
SemaphoreHandle_t signalSemaphore;
cyhal_timer_t bitTimer;
bool detect;
SemaphoreHandle_t owb_num_active;
} OneWireBus;
typedef struct {
uint8_t romAddr[8];
} OneWireBus_ROMCode;
typedef enum {
OWB_STATUS_OK,
OWB_STATUS_ERROR,
} owb_ret_t ;
owb_ret_t owb_init(OneWireBus *bus);
owb_ret_t owb_reset(OneWireBus *bus, bool *result);
owb_ret_t owb_write_bit( OneWireBus *bus, uint8_t val);
owb_ret_t owb_write_byte( OneWireBus *bus, uint8_t val);
owb_ret_t owb_write_bytes( OneWireBus *bus, uint8_t *buffer, uint32_t length);
owb_ret_t owb_write_rom_code(OneWireBus *bus, OneWireBus_ROMCode romcode);
owb_ret_t owb_read_bit( OneWireBus *bus, uint8_t *bit);
owb_ret_t owb_read_byte( OneWireBus *bus, uint8_t *byte);
owb_ret_t owb_read_bytes( OneWireBus *bus, uint8_t *buffer, uint32_t length);
owb_ret_t owb_crc8_bytes(uint32_t val, uint8_t *buffer, uint32_t length);
void owb_set_strong_pullup( OneWireBus *bus, bool val);
#endif
#ifdef __cplusplus
}
#endif
When I run the compiler again things look way better (just some complaining about const datatypes) and a complaint about the include path. The include path thing is visual studio code not knowing that I added a new directory called p6sdk-onewire.
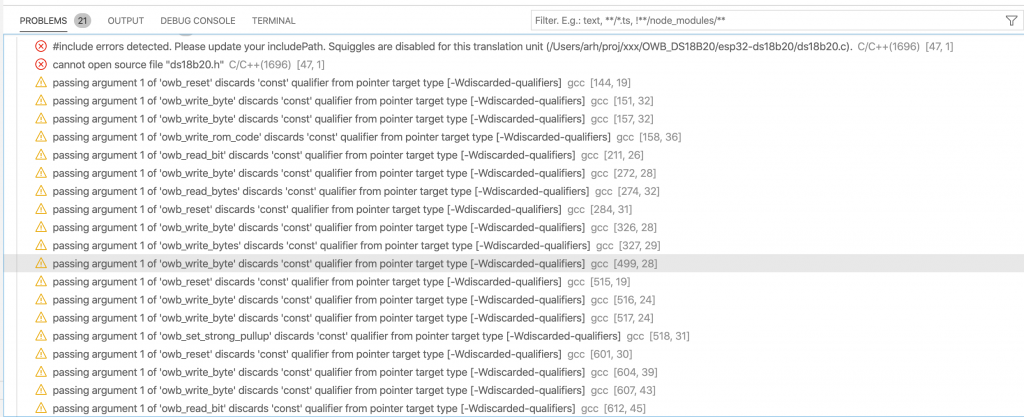
To fix the include path I run “make vscode” which tells VSCODE about the new directory.

That is a good place to split this article. In the next article I will add functions to read and write the bus.