Summary
The FreeRTOS Counting Semaphore is a simple extension of the binary semaphore that I talked about in the last two articles (PSoC Binary Semaphore, PSOC Binary Semaphore Part Two). Simply put, the semaphore counts up when “set” and counts down when “get”. When it is 0, the task that tried to “get” it is paused until some other task “set”s it. There are a number of uses of the the counting semaphore including:
- One or more producers tasks create events and one or more consumers tasks consume those events. The semaphore counts the events
- The semaphore represents one or more identical resources. When you need that resource you take the flag, use the resource, then give the flag back. (e.g. identical blocks of scratch memory)
As I worked on this article I was looking around the internet for good examples, that would visibly demonstrate the counting semaphore. There are a number of examples out there including, the dining philosophers, the line of bathrooms, the librarian but they all feel somewhat contrived. The other thing that I realized as I looked around is that there are a bunch of different names for exactly the same thing, that is getting and setting the semaphore. Those names include at least:
- Signal/Wait
- P/V
- Give/Take
- Set/Get
FreeRTOS Counting Semaphore Danger
There are a number of scenarios that can cause you much pain with threaded RTOS programming and semaphores. Two of those cases are circular deadlocks and priority inversion.
The circular deadlock occurs when A depends on B who depends on C who depends on A. If your program finds itself in this state, you will have a deadlock, which is almost certainly a highly-not-good thing. A variation of the circular deadlock occurs when you have multiple threads that are dependent on a pool of shared resources and you end up with the scenario where each threads only has one of the resource that its needs (e.g. it requires 2 of the resources to get a job done). Each thread is then stopped, and waiting for one of the other threads to release the resource.
The other problem that can occur (and be difficult to debug) is called priority inversion. This can occur when a lower priority thread gets access to a scarce shared resource. And, a higher priority thread ends up waiting for that shared resource. This scenario effectively gives the lower priority task a higher priority.
PSoC FreeRTOS Counting Semaphore Example
My example is simply to have one task (called countingSemaphore) which is consuming events and multiple places that are creating events. When there are events available, the countingSemaphore task will just printout the number of events, decrement a.k.a. take the semaphore, then loop back. I start by copying the project “4-Binary-Semaphore” and creating a new project called “5-Counting-Semaphore”.
To make this work, I first declare a global variable to hold the counting semaphore.
SemaphoreHandle_t countingSemaphore;
Then I initialize it in main
countingSemaphore = xSemaphoreCreateCounting(5,0); // Max=5 - Initial=0
Create the counting semaphore task
/* To print when the counting semaphore is taken */
xTaskCreate(
countingSemaphore_Task, /* Task function */
"countsema", /* Task name (string) */
0x100, /* Task stack, allocated from heap */
0, /* No param passed to task function */
1, /* Low priority */
0 );
I make the task that will take the semaphore, then print the semaphore count, then start again.
void countingSemaphore_Task(void *arg)
{
(void)arg;
char buff[16];
while(1)
{
xSemaphoreTake(countingSemaphore,portMAX_DELAY);
sprintf(buff,"Count = %d\n",(int)uxSemaphoreGetCount( countingSemaphore ));
UART_UartPutString(buff);
}
}
Lastly I add the ability to “create events” by making the 1,2,3 keyboard keys create 1,2,3 events (a.k.a. set the semaphore 1,2,3 times)
case '1':
xSemaphoreGive(countingSemaphore);
break;
case '2':
xSemaphoreGive(countingSemaphore);
xSemaphoreGive(countingSemaphore);
break;
case '3':
xSemaphoreGive(countingSemaphore);
xSemaphoreGive(countingSemaphore);
xSemaphoreGive(countingSemaphore);
break;
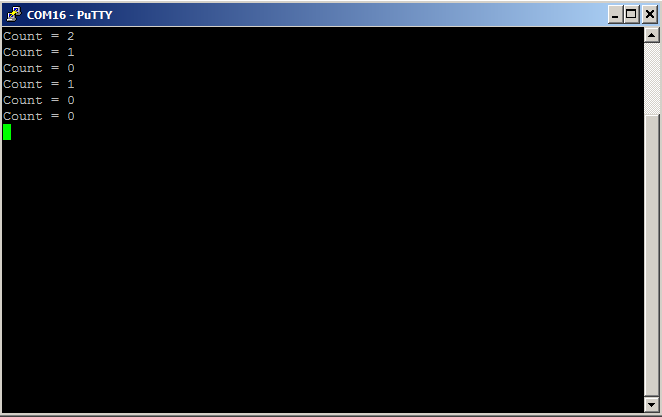
To test the program, I start up a terminal and:
- press ‘3’, which gives the semaphore 3 times in a row. Then the countingSemaphore task consumes the “gives” with “takes” and prints out “2,1,0”
- press ‘2+’, which gives the semaphore 2 times in a row. Then the countingSemaphore task consumes the “gives” with “takes” and prints out “1,0”
- press ‘1’, which gives the semaphore 1 time. Then the countingSemaphore task consumes the “give” with “take” and prints out “0”
You can find this example on the IoT Expert GitHub website or git@github.com:iotexpert/PSoC-FreeRTOS-Examples.git
Topic
Description
FreeRTOS: A PSoC4 FreeRTOS Port
An introduction to making FreeRTOS work on PSoC 4
FreeRTOS PSoC Examples
Using multiple tasks in FreeRTOS
FreeRTOS Queue Example
Using a queue to communicate between tasks
PSoC 6 FreeRTOS - The First Example
Booting FreeRTOS on PSoC 6
FreeRTOS Binary Semaphore
An first example of a binary semaphore
FreeRTOS Binary Semaphore (Part 2)
Removing polling in the UART Task
FreeRTOS Counting Semaphore
An example using a counting semaphore
PSoC FreeRTOS
Reading I2C Sensors with a shared I2C Bus
PSoC FreeRTOS Task Notify
A light weight scheme to replace Semaphores
PSoC FreeRTOS Task Notification Values
A very light weight method to transfer one word of information into a task

No comment yet, add your voice below!