Designing low-power, cloud-connected IoT devices with PSoC® 6 MCU’s and WICED® Wi-Fi/Bluetooth
Summary
At this point we have a working BLE Remote Control and a working Game. In this lesson I’ll merge the two projects together so that the GoBle remote control will be able to control the game paddle. It will do this by creating messages (just like the CapSense messages) and sending them to the Game thread via the paddleQueue. And it will send “Button0” messages when “Button A” is pressed.
To implement this lesson I will follow these steps:
- Copy everything into a new project
- Modify the Makefile
- Modify main.c
- Create a new make target
- Test it all to make sure things are still working
- Modify GoBleThread.c
- Program and Test
Copy L4Game into a new project L6GameBle
Use “copy” and “paste” to create a new project, when you paste give it the name “L6GameBle” (there is an error in the screenshot)
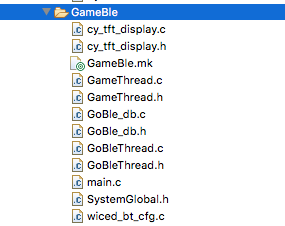
Copy the files GoBle_db.c/h, GoBleThread.c/h, and wiced_bt_cfg.c from the GoBle project into your new GameBle project. After that is done your project should look like this:
Modify the Makefile
- Change the name of the App to “App_WStudio_L6GameBle”
- Add the new source files
- Add the BLE Library “libraries/drivers/bluetooth/low_energy”
NAME := App_WStudio_L6GameBle
$(NAME)_SOURCES := main.c \
CapSenseThread.c \
GameThread.c \
cy_tft_display.c \
GoBleThread.c \
GoBle_db.c \
wiced_bt_cfg.c
$(NAME)_COMPONENTS := graphics/ugui \
libraries/drivers/bluetooth/low_energy
Modify main.c
Add the include for the GeBleThread.
#include "GameThread.h" #include "GoBleThread.h" #include "CapSenseThread.h" #include "wiced.h"
In the application_start function add a call GoBleThread_start() to get the GoBle thread going
void application_start( )
{
wiced_init( );
wiced_rtos_init_queue(&paddleQueue,"paddleQueue",sizeof(game_msg_t),10);
wiced_rtos_create_thread(&blinkThreadHandle,7,"Blink Thread",pdlBlinkThread,500,0);
wiced_rtos_create_thread(&capSenseThreadHandle,7,"CapSense Thread",capSenseThread,1024,0);
wiced_rtos_create_thread(&gameThreadHandle,7,"game Thread",gameThread,4096,0);
GoBleThread_start();
}
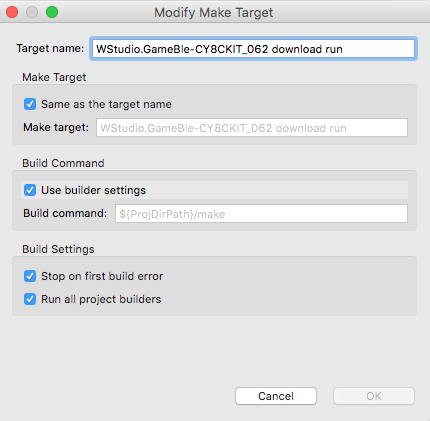
Create a new make target
Test it all to make sure things are still working
Run the make target and make sure that the game still plays and that you can get remote control messages.
Modify GoBleThread.c
Add the includes for the GameThread (to get access to the game message structure) and SystemGlobal (to get access to the queue)
#include "GameThread.h" #include "SystemGlobal.h"
I don’t need (or want) the button/slider printout information. So I will delete the old button code from goble_event_handler. (delete this stuff)
WPRINT_APP_INFO(("# Buttons = %d ButtonMask=%02X Slider x=%02X Slider Y=%02X Raw=",(int)numButtons,(unsigned int)buttonMask,(unsigned int)sliderX,(unsigned int)sliderY));
for(int i=0;i<p_attr_req->data.write_req.val_len;i++)
{
WPRINT_APP_INFO(("%02X ",p_attr_req->data.write_req.p_val[i]));
}
WPRINT_APP_INFO(("\n"));
Now, update the code to send the slider and button information to the GameThread (via the paddleQueue). You may have noticed that the slider on GoBle gives you 0->0xFF and the direction is the inverse from the game we setup. So, I will scale the value to 100 and invert it so that the controller moves the paddle the right way on line 143. The message format is exactly the same as what we setup for the CapSense. This means the CapSense slider works at the same time as the GoBle controller.
case GATT_ATTRIBUTE_REQUEST_EVT:
p_attr_req = &p_event_data->attribute_request;
if( p_attr_req->request_type == GATTS_REQ_TYPE_WRITE && p_attr_req->data.handle == HDLC_GOBLE_SERIALPORTID_VALUE)
{
uint32_t numButtons = p_attr_req->data.write_req.p_val[3];
uint32_t sliderY = p_attr_req->data.write_req.p_val[5+numButtons];
uint32_t sliderX = p_attr_req->data.write_req.p_val[6+numButtons];
uint32_t buttonMask = 0x00;
for(int i=0;i<numButtons;i++)
{
buttonMask |= (1<<p_attr_req->data.write_req.p_val[5+i]);
}
game_msg_t msg;
msg.evt = MSG_POSITION;
msg.val = 100 - (100*sliderY/255);
wiced_rtos_push_to_queue(&paddleQueue,&msg,0);
if(buttonMask & 0x10)
{
msg.evt = MSG_BUTTON0;
msg.val = 1;
wiced_result_t result=wiced_rtos_push_to_queue(&paddleQueue,&msg,0);
}
status = WICED_BT_GATT_SUCCESS;
}
break;



No comment yet, add your voice below!