As I talked about in my previous post I am going to use a PSoC as a servo motor controller as well as a CapSense UI. The problem is that I wanted a really easy way to plug the servo motors into the PSoC. It seems like all of the servos have a 3 wire interface, Power, Ground and PWM. Here is a picture that I got from Adafruit’s website.
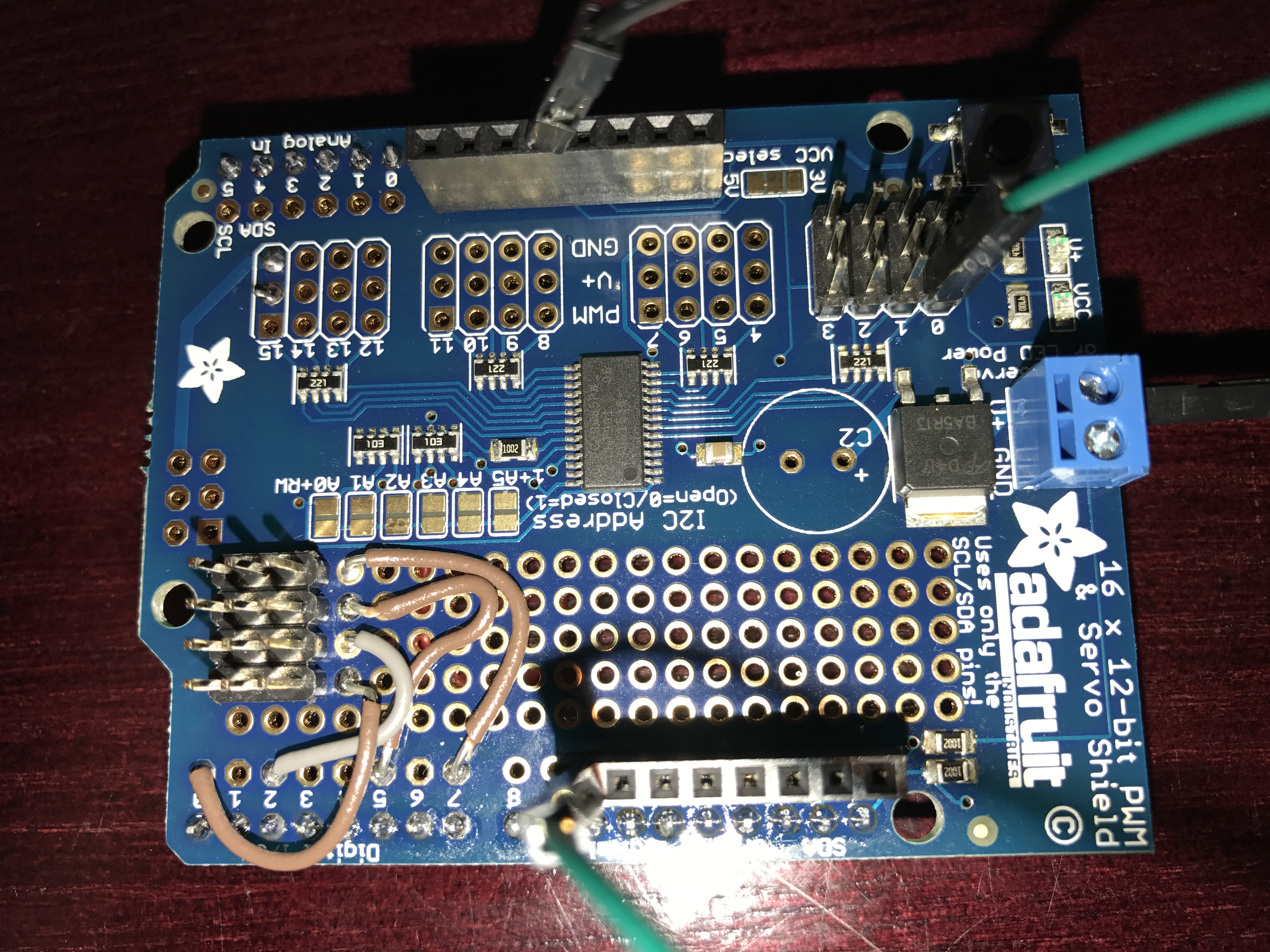
I was originally hoping that I could connect that servo directly to the PSoC, drive a ‘1’ to the power and a ‘0’ to the ground and PWM to the third input. But, it turns out that these things suck some serious juice (100+ma?) so driving the power with the PSoC isn’t in the cards. Given them amount of time that I had left, there was not time for a custom board, so I was in the situation of using a breadboard with wires all over the place which is ugly and a bit of a pain. However, on Thursday I thought that I might find a “Servo Shield” and sure enough there are a number of them out there including this one which I got from Adafruit. The problem is this shield uses a 16 channel I2C –> PWM driver from NXP. I am not a fan of doing things with peripheral chips that PSoC can do for itself. But, when I got the shield this morning in the mail there was a cool prototyping area on the shield. So, I made my own header for connecting to the PSoC. Here is the front:
And here is the back:
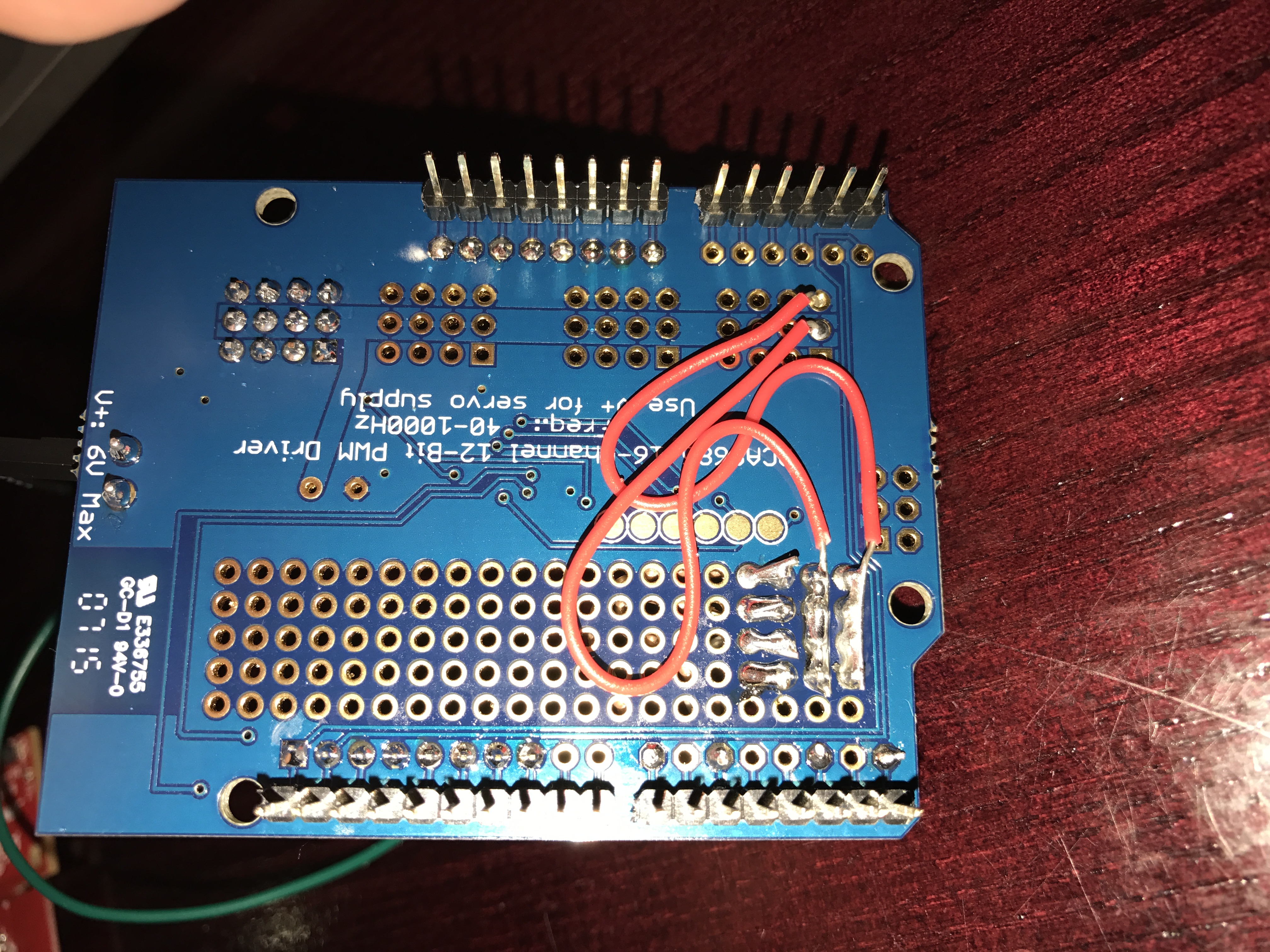
You can see that I shorted the whole row of ground together with a big blog of solder and wire. I did the same thing with the power (the middle row). Then I made a wire from each of the 4 PWMs pins to a good place on the PSoC (which I could drive the pins directly from one of the TCPWMs)

The board worked great on my bench. The only thing that I have done which is VERY questionable is that I wired the power supply for the system directly to the V5.0 aka VBUS… which I suppose will get me through the conference, but is probably a bad idea (the green wire in the top picture)
As I was flying to Detroit I thought that I might try to see how the I2C->PWM worked… so I read the data sheet for the NXP PCA9685. It turns out that the chip is pretty cool. You can set the output frequency by setting a divider value in one of the registers (oxFE). The number you set is val=round(25e6/(4096*rate)) – 1. That means for me to get 50hz to drive the motors I need to set the divider to 121. Then to set the duty cycle each output has a 12-bit PWM where you can set “LED ON” and a “LED Off” count. For instance to get a 25% duty cycle you can set the On to 0 and the off to 1024.
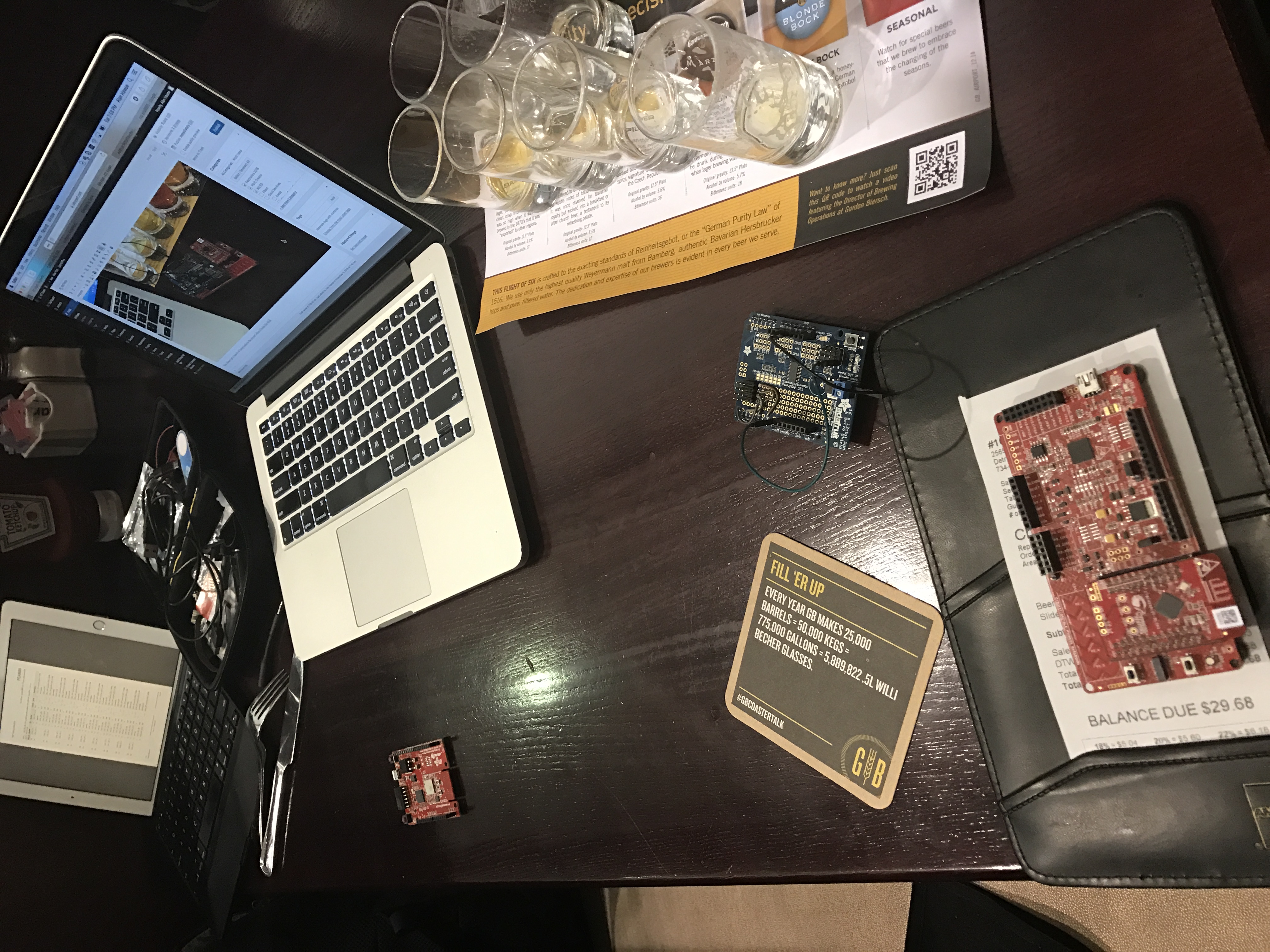
After I got off the airplane in Detroit I went to get some “dinner” and I wanted to try out the shield so I hooked it up:
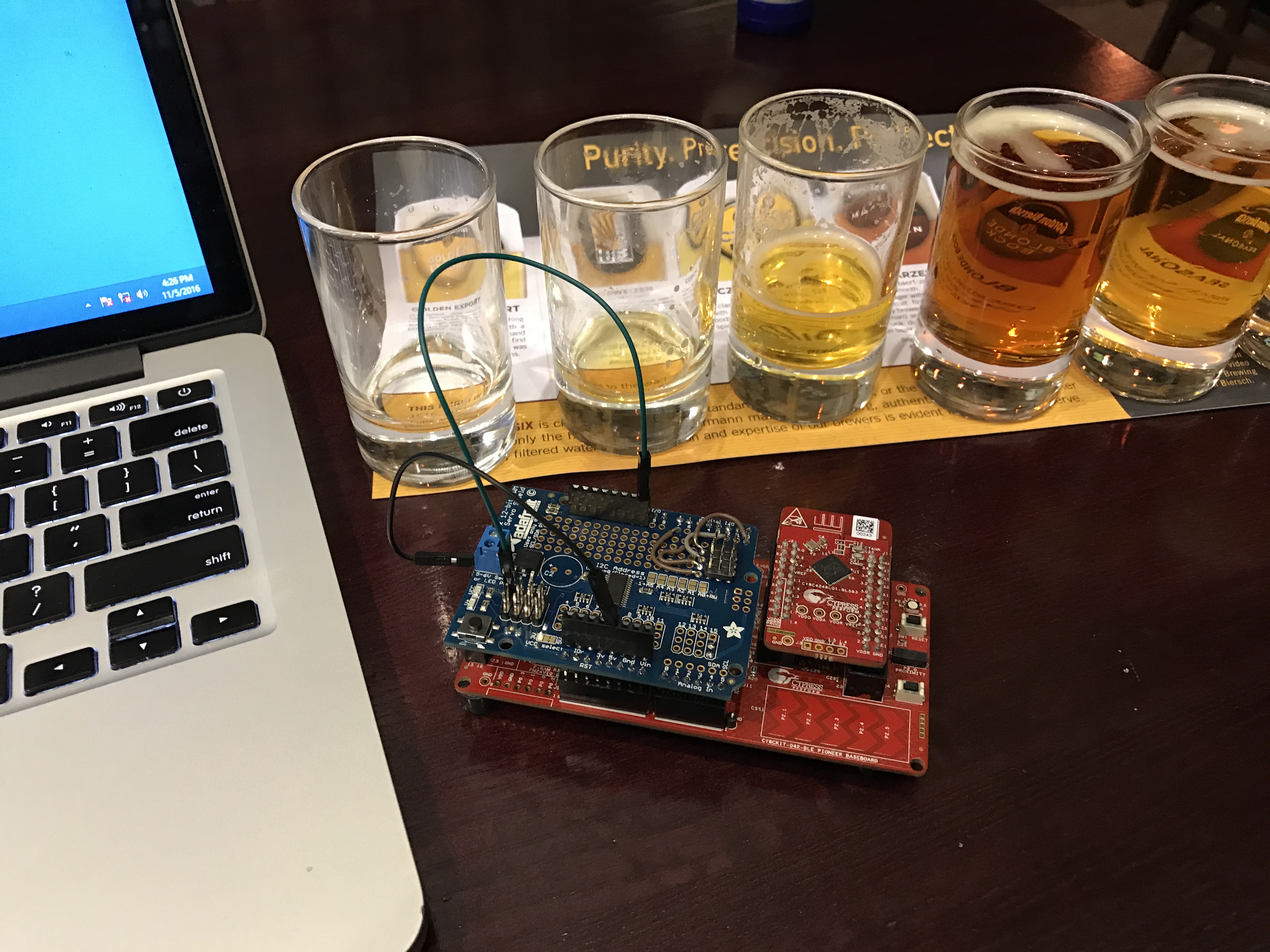
You always get a bunch of funny looks in the airport when your table looks like this:
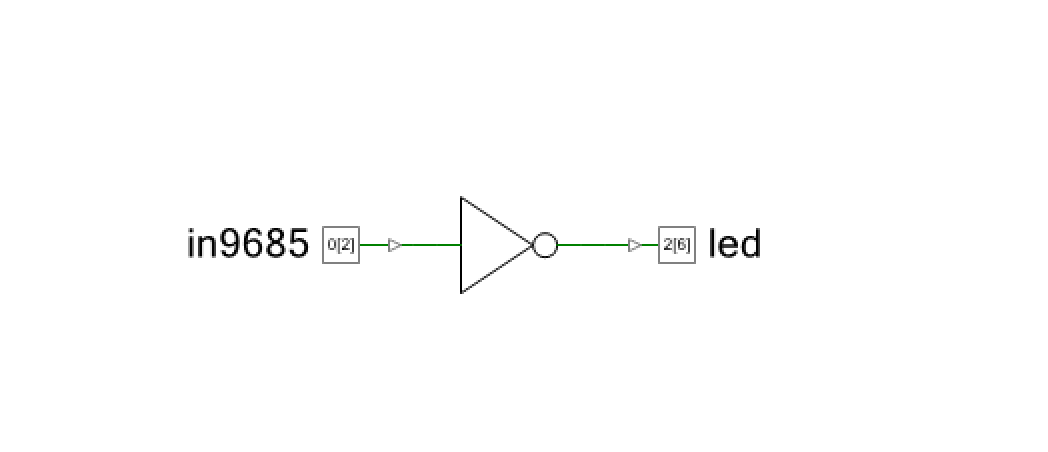
 This left me with only one problem. How to drive the shield PWMs onto something that I could see… I didnt pack my Tek in my carry on (though I suppose I could have used one of those little scopes). But, I digress. What I decided to do is make the PSoC echo an input onto on output pin that was connected to an LED. So, I drew this schematic. This can only be done in with a PSoC because I used a logic gate in the UDB to flip the 9685 PWM from Low to High so that my active low LED would work right.
This left me with only one problem. How to drive the shield PWMs onto something that I could see… I didnt pack my Tek in my carry on (though I suppose I could have used one of those little scopes). But, I digress. What I decided to do is make the PSoC echo an input onto on output pin that was connected to an LED. So, I drew this schematic. This can only be done in with a PSoC because I used a logic gate in the UDB to flip the 9685 PWM from Low to High so that my active low LED would work right.
Next I fly to Charles De Gaul, the suckiest airport in the first world. What will I do on the airplane there? I don’t, but given those empty beer glasses I may sleep. More to follow when I get to Germany.

No comment yet, add your voice below!