Summary
In the previous articles I discussed using the FRAM, and making a FreeRTOS FAT SL media driver. In this article I will discuss building an example project that uses that work to make a real FreeRTOS FAT SL system example. I was originally planning on making just one article explaining the example, but my example code turned out to be a little bit sprawling, so I decided to break it into two pieces. In part 1 (this article) I will
- Build the FreeRTOS Template
- Import the FreeRTOS FAT SL FileSystem & FRAM Media Driver
- Build a command line interpreter
- Nuke the data in the FRAM
In the next article I will show you the details of using the FreeRTOS FAT SL filesystem.
Build the FreeRTOS Template & Schematic
I start the project from my FreeRTOS template project. You can read all about that here. Then I add in the components required to make things work. The schematic is simple:
- A UART component to run the Command Line Interpreter
- An I2C to control the FRAM
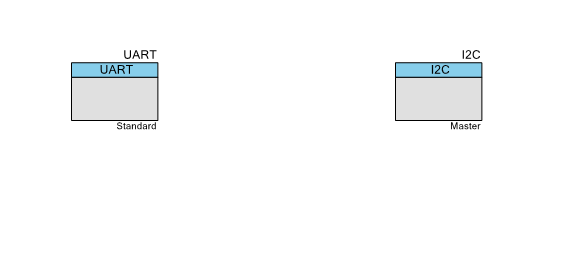
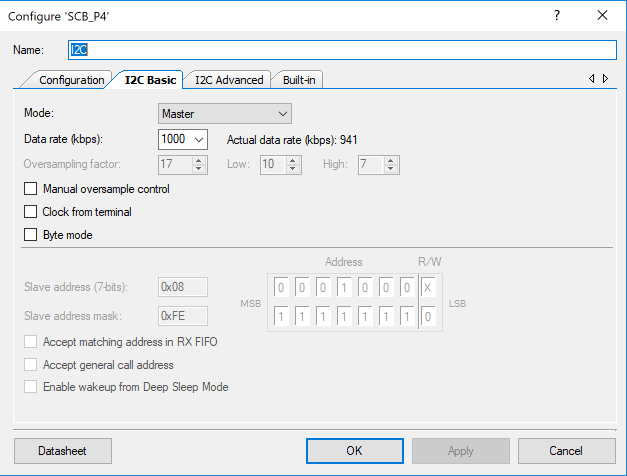
The I2C is setup as a master at it highest speed setting.
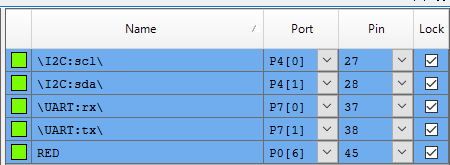
On the CY8CKIT-044 the pins need to be configured as so:
Import the FreeRTOS FAT SL FileSystem & FRAM Media Driver
The first step in importing the FreeRTOS FAT SL FileSystem and and media driver is to copy the FreeRTOS-Plus-FAT-SL directory into my project. Once that is done, my folder structure looks like this:
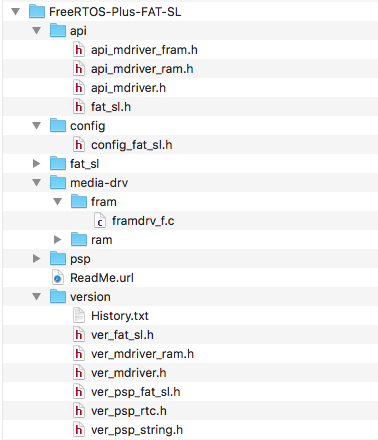
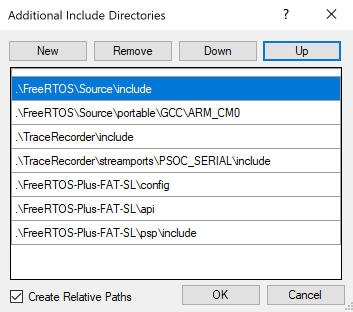
The next step is to fix the include paths to include the config, api and psp include directories. This can be done on the build settings menu.
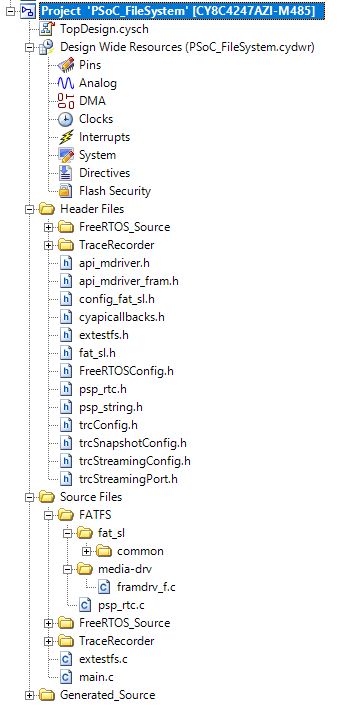
Finally I import the .h and .c files into my project so that it looks like this:
Build a Command Line Interpreter (CLI)
I think that it is convenient to have a command line utility (one that connects to the UART port) to send commands to my program to test it. To build the CLI, I create a task called uartTask which takes keys from the terminal and then processes them in a giant switch statement. While I was building the FreeRTOS FAT SL system, I noticed that FreeRTOS also has a scheme for CLIs which I will try out in the future.
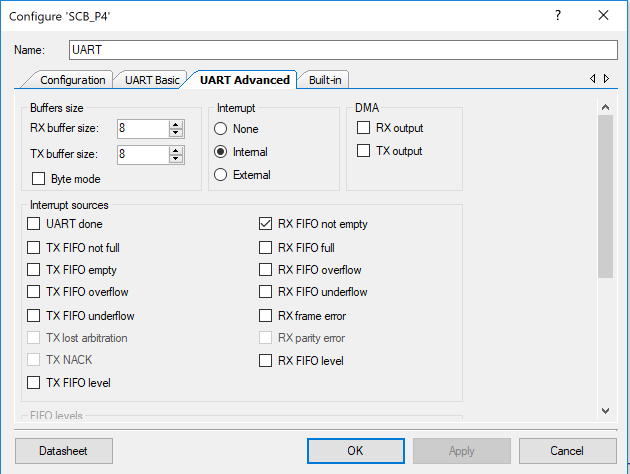
In the UART configuration I turn on the “RX FIFO not empty” interrupt (meaning that there is data in the fifo that needs to be processed)
I connect the interrupt to the interrupt service routine on line 64. In the ISR I use the FreeRTOS notification scheme to send notifications to the uartTask to wakeup and process data (line 50).
My CLI has two different things that it does:
- It calls functions in the file extestfs.c that start with “ex” , meaning example, to format, initalize etc.
- It keeps a “currentSector” variable that lets me print out the raw data in a sector. The currentSector variable is incremented (with the keyboard +) and decremented (with the keyboard -) and set to 0 with the (keyboard 0)
Once all of the keys have been processed (the Rx FIFO buffer is empty – line 71), it turns back on the Rx FIFO interrupt (lines 150-151), then waits for another notification from the ISR (line 69)
TaskHandle_t uartTaskHandle;
void uartISR()
{
BaseType_t xHigherPriorityTaskWoken;
// disable the interrupt
UART_SetRxInterruptMode(0);
vTaskNotifyGiveFromISR(uartTaskHandle,&xHigherPriorityTaskWoken);
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
// This is the main task which processes commands from the UART and prints the results
// on the screen.
void uartTask(void *arg)
{
(void)arg;
UART_Start();
I2C_Start();
clearScreen();
UART_UartPutString("Start Filesystem Demo\n");
UART_SetCustomInterruptHandler(uartISR);
int currentSector=0;
while(1)
{
ulTaskNotifyTake(pdTRUE,portMAX_DELAY);
while(UART_SpiUartGetRxBufferSize()) // if there is data then read and process
{
char c;
c= UART_UartGetChar();
switch(c)
{
case 'i': // Initialize the RTOS
exInit();
break;
case 'f': // Format the FRAM
exFormat();
break;
case 'q': // Return the drive information
exDriveInfo();
break;
case 'w': // Create a file
exCreateFile();
break;
case 'r': // Read the file that was created (if it exists)
exReadFile();
break;
case '0': // Goto to sector 0 and print the data
currentSector = 0;
exPrintSector(0,0,0);
break;
case '+': // Print the "current" sector and go to the next
exPrintSector(0,0,currentSector);
currentSector += 1;
break;
case '-': // print the current sector and go to the previous
exPrintSector(0,0,currentSector);
currentSector -= 1;
if(currentSector<0)
currentSector =0;
break;
case 'd': // Do a directory
exDirectory();
break;
case 'c':
clearScreen();
break;
case 'b': // Erase the FRAM (write all 0's)
blankFRAM();
break;
case '?': // Print out the list of commands
UART_UartPutString("b - Blank FRAM - write all 0's\n");
UART_UartPutString("i - Initalize Filesystem\n");
UART_UartPutString("f - Format FRAM\n");
UART_UartPutString("q - Print FileSystem Information\n");
UART_UartPutString("w - Create a file called \"afile.bin\"\n");
UART_UartPutString("r - Read the file called \"afile.bin\" and print contents\n");
UART_UartPutString("0 - Goto sector 0 and print contents\n");
UART_UartPutString("+ - Goto next sector and print contents\n");
UART_UartPutString("- - Goto previous sector and print contents\n");
UART_UartPutString("d - Print Directory\n");
UART_UartPutString("c - Clear Screen\n");
UART_UartPutString("? - Print help\n");
break;
default:
UART_UartPutString("Unknown :");
UART_UartPutChar(c);
UART_UartPutChar('\n');
break;
}
}
// Turn the interrupts back on
UART_ClearRxInterruptSource(UART_INTR_RX_NOT_EMPTY);
UART_SetRxInterruptMode(UART_INTR_RX_NOT_EMPTY);
}
}
Nuke the FRAM Data
I thought that it would be a good idea to have a function to put 0’s in all of the locations in the FRAM, to prove that I could start with a clean slate. This function does just that. Specifically it write 0’s to the 64K locations in I2C address 0x50 (the first bank) and to I2C address 0x51 (the second bank)
// This function erases - write 0's into the FRAM... also known as NUKE the FRAM
void blankFRAM(void)
{
int i;
UART_UartPutString("Starting Erase 1st Block\n");
I2C_I2CMasterSendStart(0x50,I2C_I2C_WRITE_XFER_MODE);
I2C_I2CMasterWriteByte(0);
I2C_I2CMasterWriteByte(0);
for(i=0;i<0xFFFF;i++) // Write 64K of 0's to erase first bank
{
I2C_I2CMasterWriteByte(0);
}
I2C_I2CMasterSendStop();
UART_UartPutString("Starting Erase 2nd Block\n");
I2C_I2CMasterSendStart(0x51,I2C_I2C_WRITE_XFER_MODE);
I2C_I2CMasterWriteByte(0);
I2C_I2CMasterWriteByte(0);
for(i=0;i<0xFFFF;i++) // write 64k of 0's to erase 2nd bank
{
I2C_I2CMasterWriteByte(0);
}
I2C_I2CMasterSendStop();
UART_UartPutString("Erase Complete\n");
}
As always you can find this project on the IoT Expert GitHub site git@github.com:iotexpert/PSoC-FileSystem.git


No comment yet, add your voice below!